
Cada servomotor tendrá tres terminales, uno para el positivo, otro para tierra y otro para entrada de señal de control.
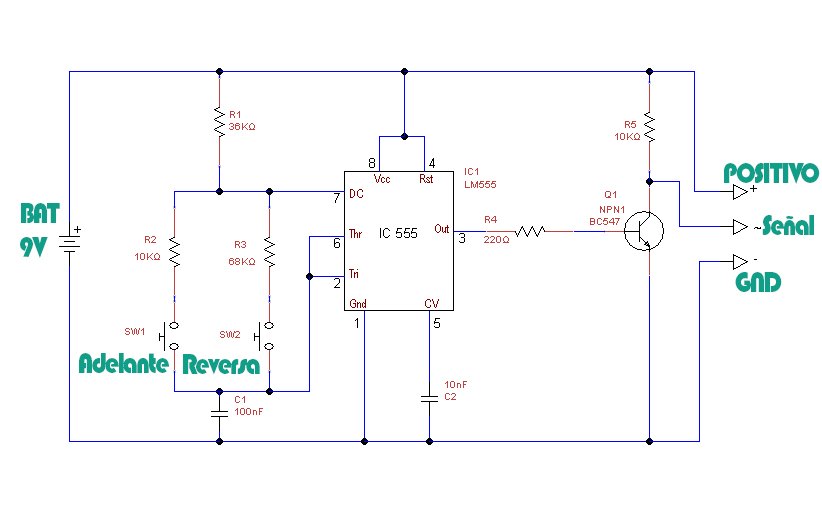
Este circuito está diseñado para proporcionar salida de señal PWM, que puede controlar la rotación y la posición del servomotor.
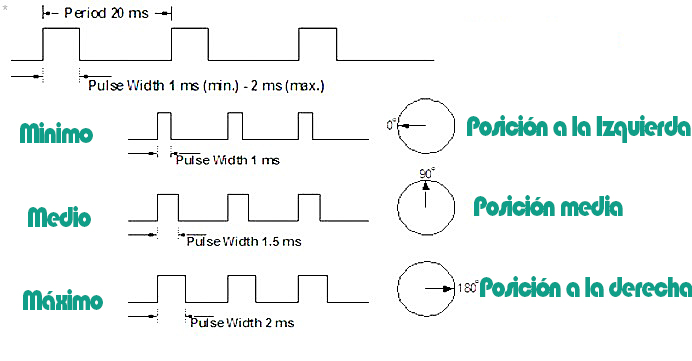
En este esquema da a entender la rotación del servo basada en la señal PWM. Hay que detallar la señal con el período de 20 ms y el ancho de la duración del pulso ALTO 1 ms (min) y 2 ms (máx.), Depende de la duración del tiempo de la señal del pulso en ALTO que es donde cambia la rotación del servomotor.
Aquí, el temporizador IC 555 se empleó como un multivibrador astable y produce un pulso en la salida con dos duraciones de pulso diferentes, sabemos que el tiempo de pulso de salida en 555 depende de la resistencia de temporización y del condensador de temporización.
Tiempo de impulso alto TH = 0,693 * (RA + RB) * C
Tiempo de pulso bajo TL = 0.693 * RB * C
NOTA: Aquí RA es la resistencia R1 y RB es R2 o R3 depende del botón (SW) que es presionado.
Cuando el interruptor SW1 se cierra, el 555 temporizador IC produce un pulso alto de larga duración y el servo gira en la dirección derecha. Cuando se cierra el interruptor SW2, el 555 temporizador IC produce un pulso alto de corta duración y el servo gira en la dirección izquierda.
Nota: Depende del ciclo de trabajo del pulso de salida, la dirección de rotación del servomotor y la velocidad cambian.
DATASHEET
APRENDE MÁS
Capacítate en los cursos de mayor demanda laboral y profesional en el área de Electricidad, Automatización & Electrónica y consigue los éxitos que te mereces. Ver información completa: https://electrotec.pe/tienda/verano-electrotec-201...
