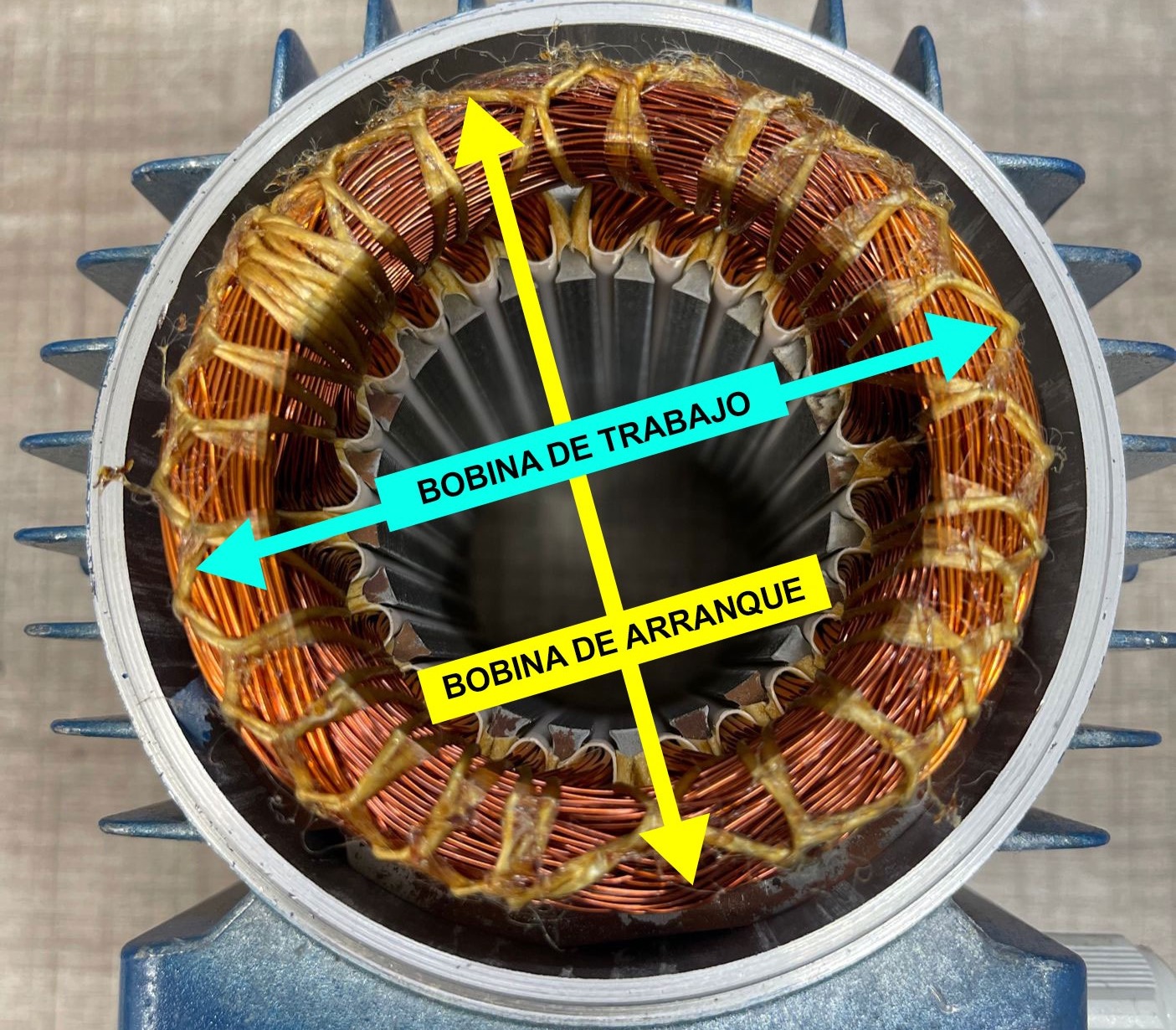
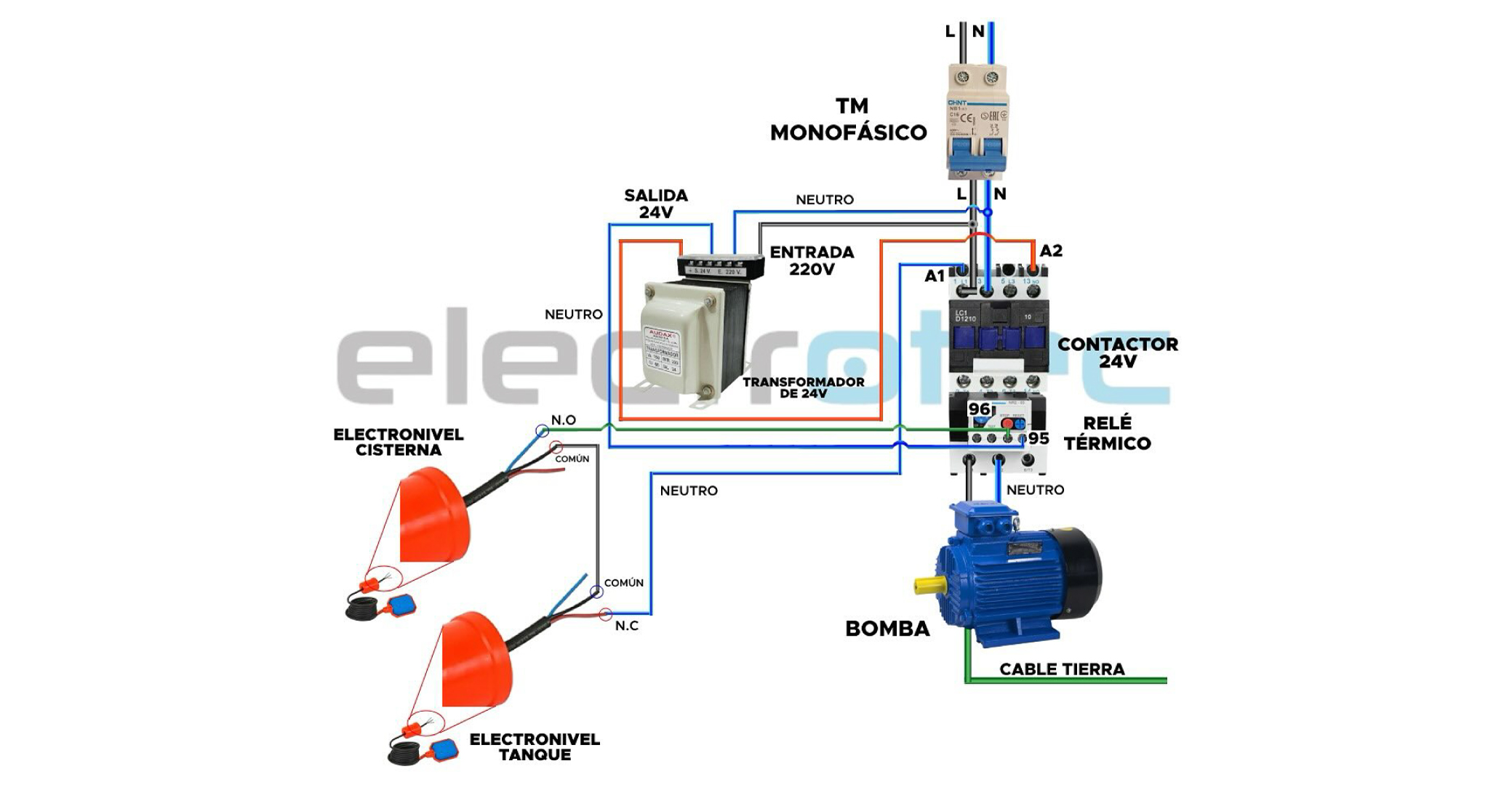
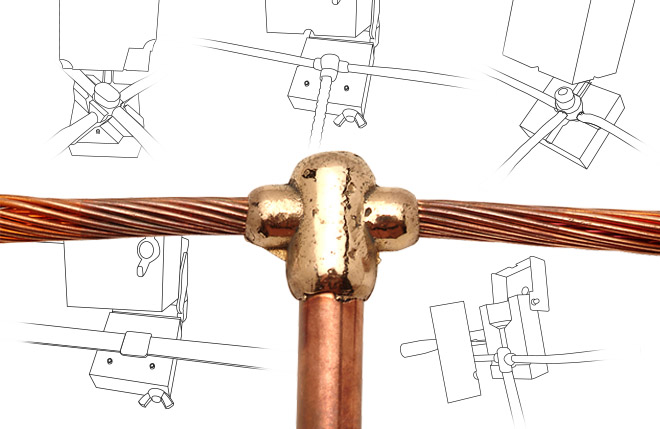
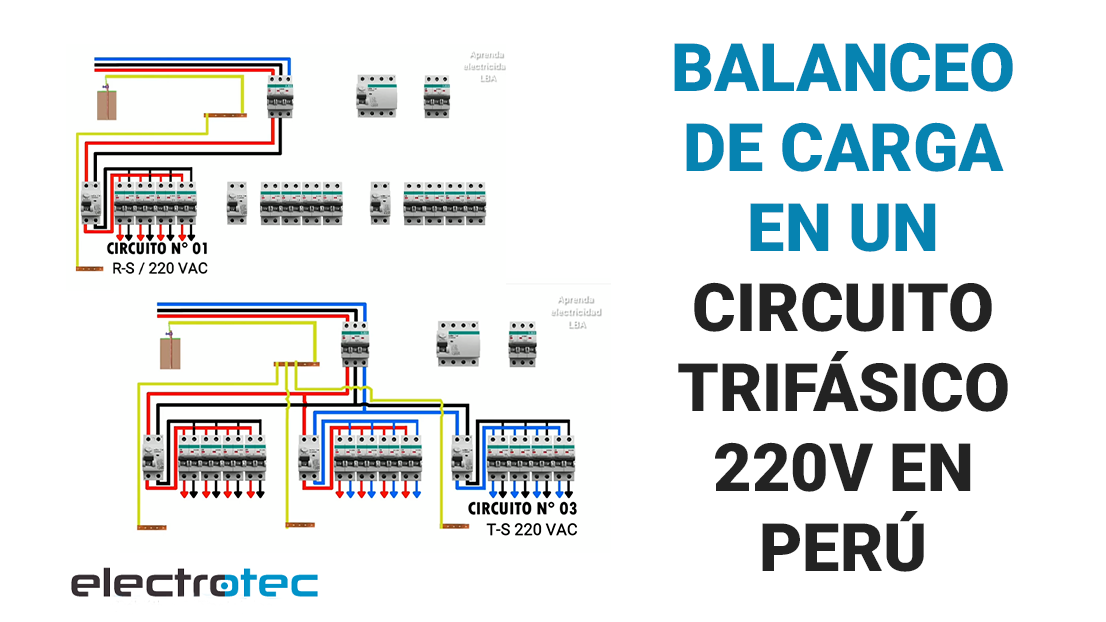
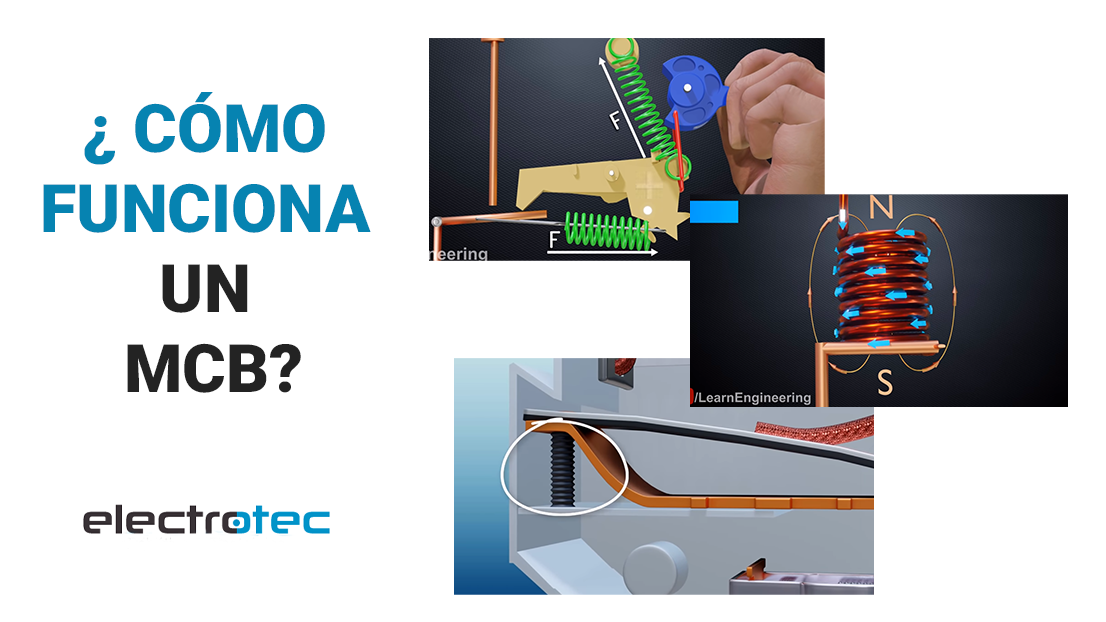
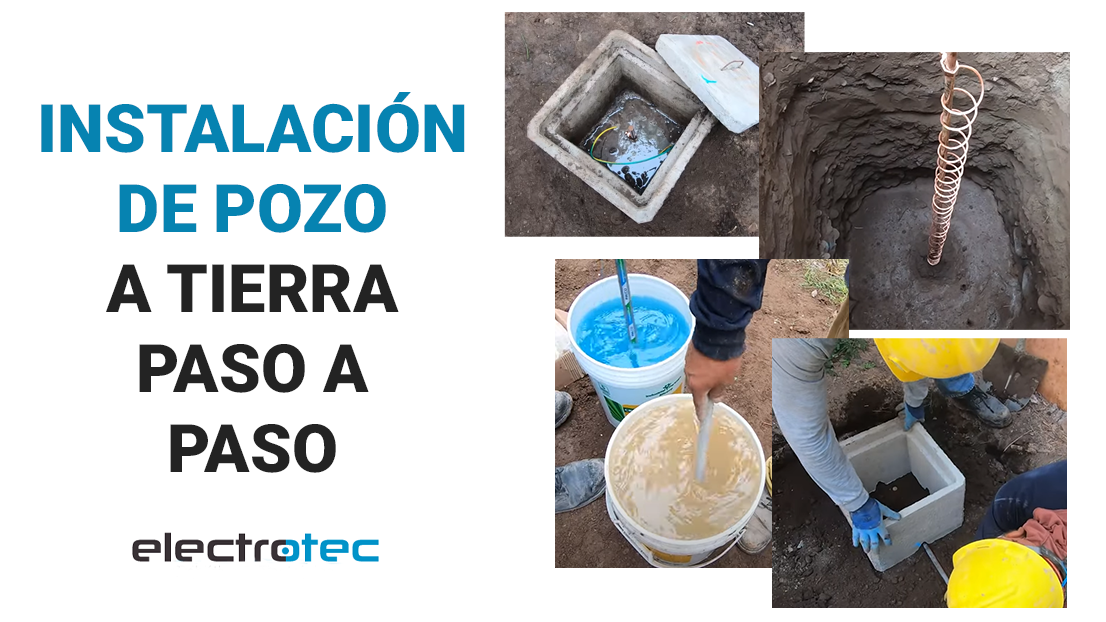
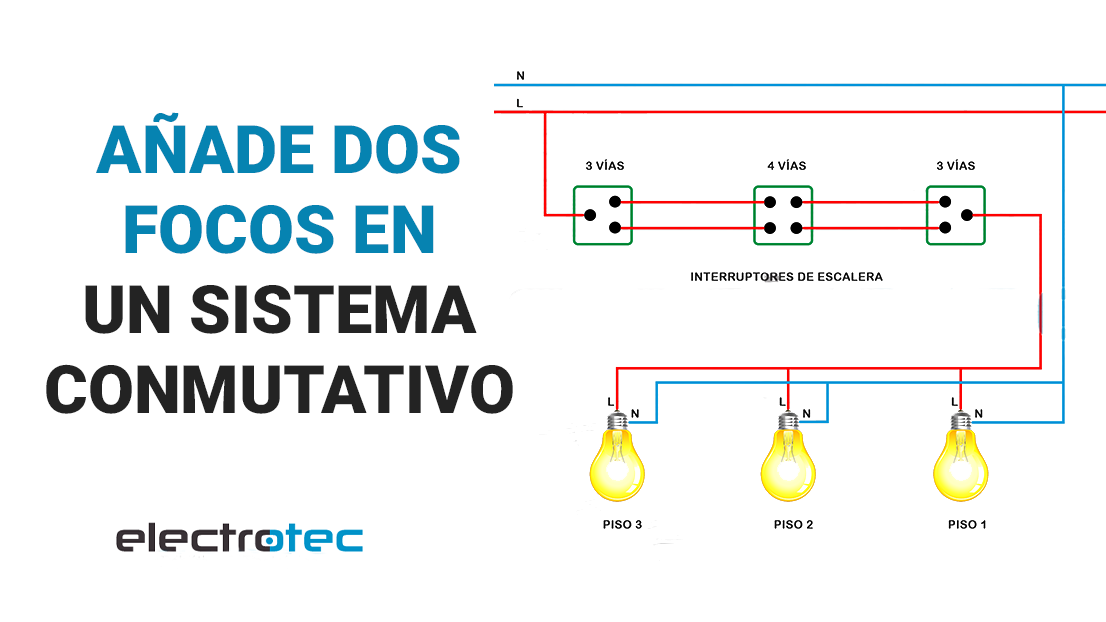
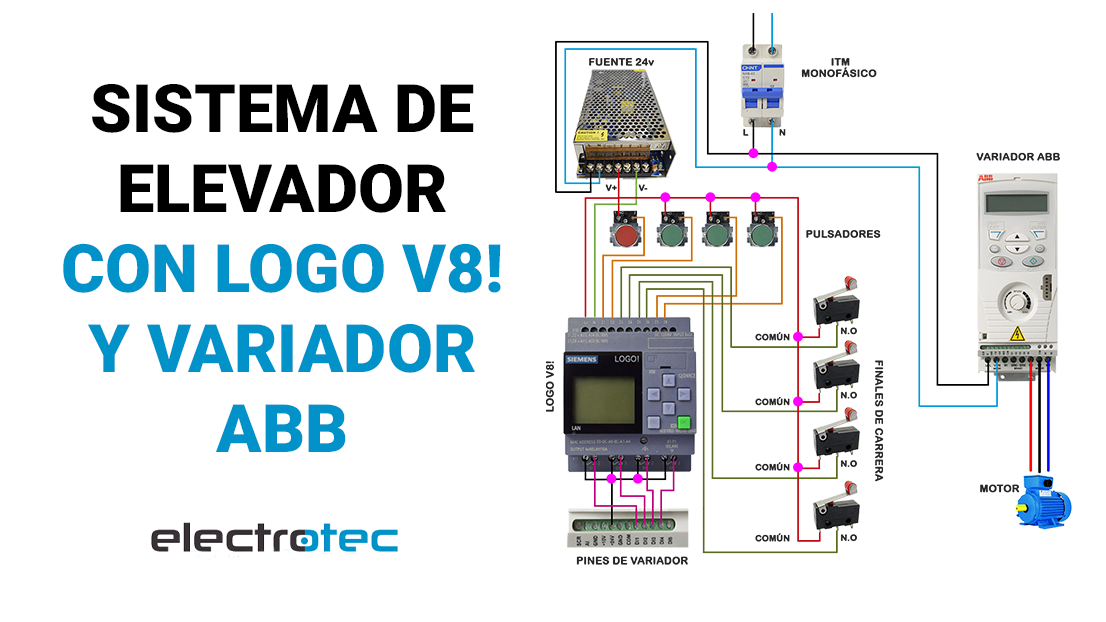
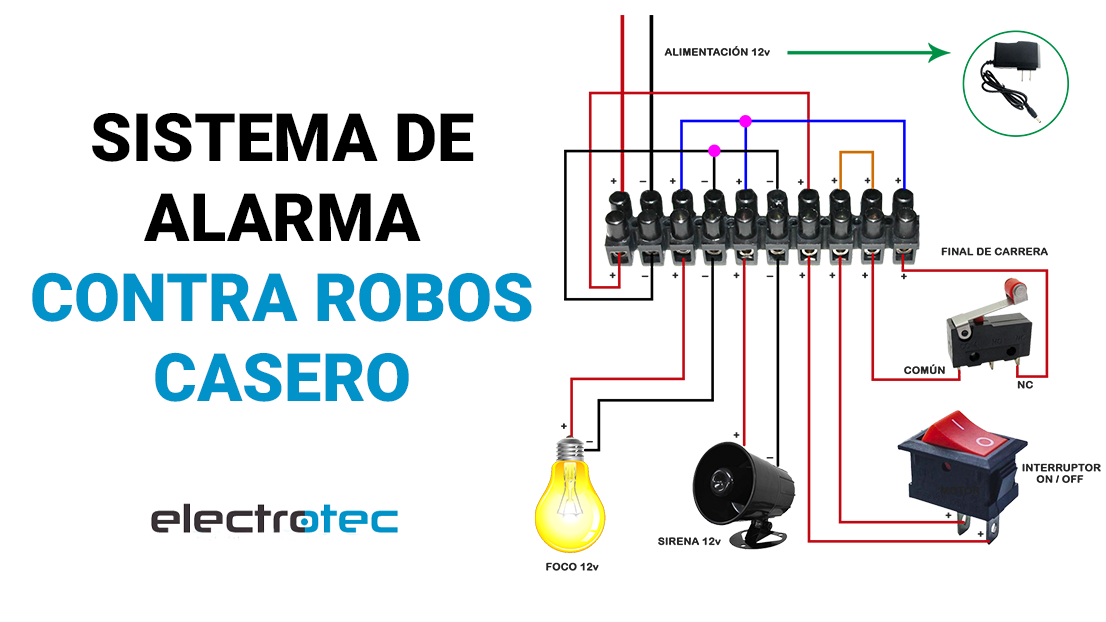
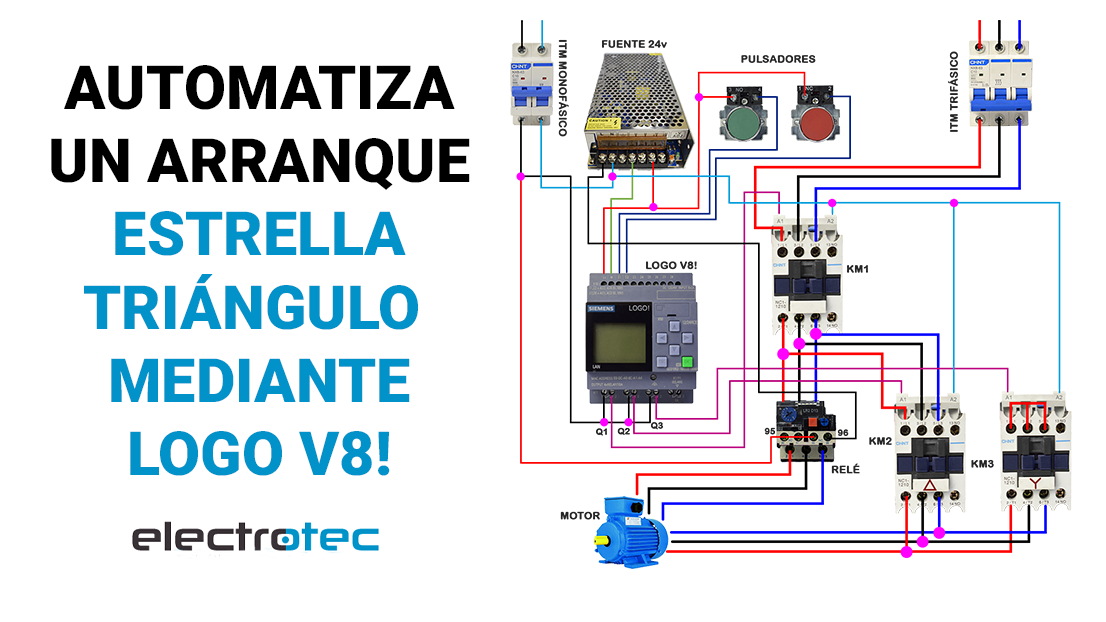
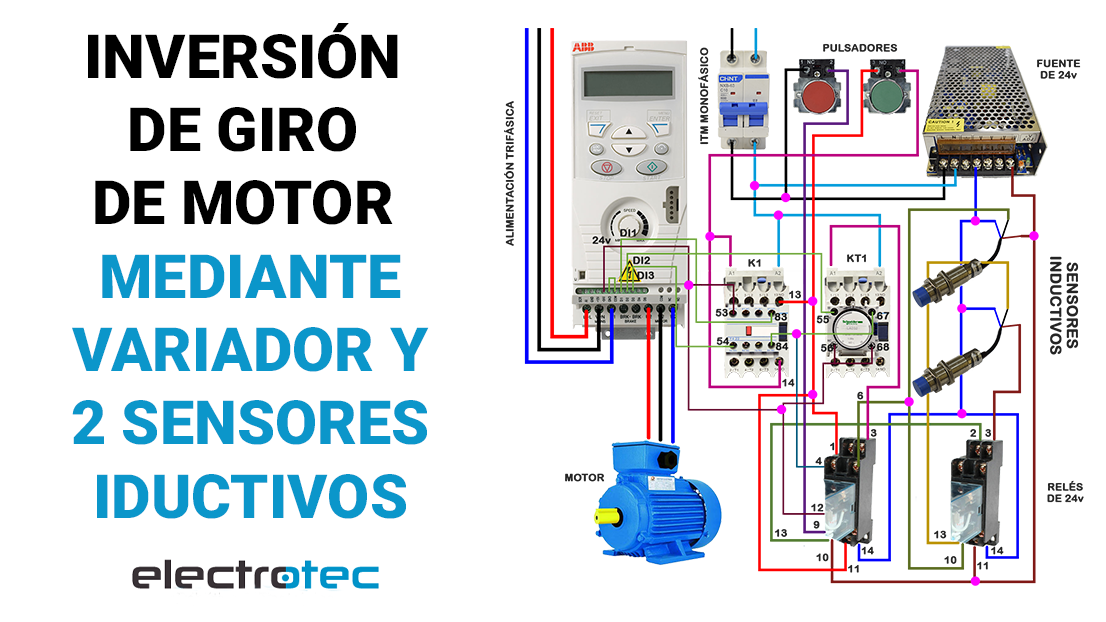
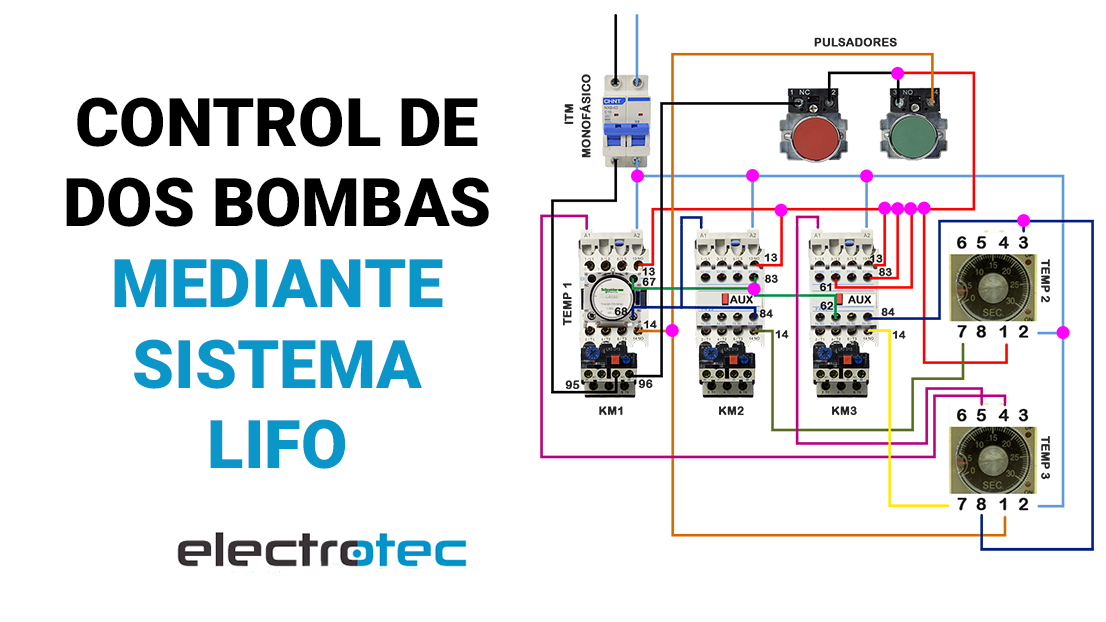
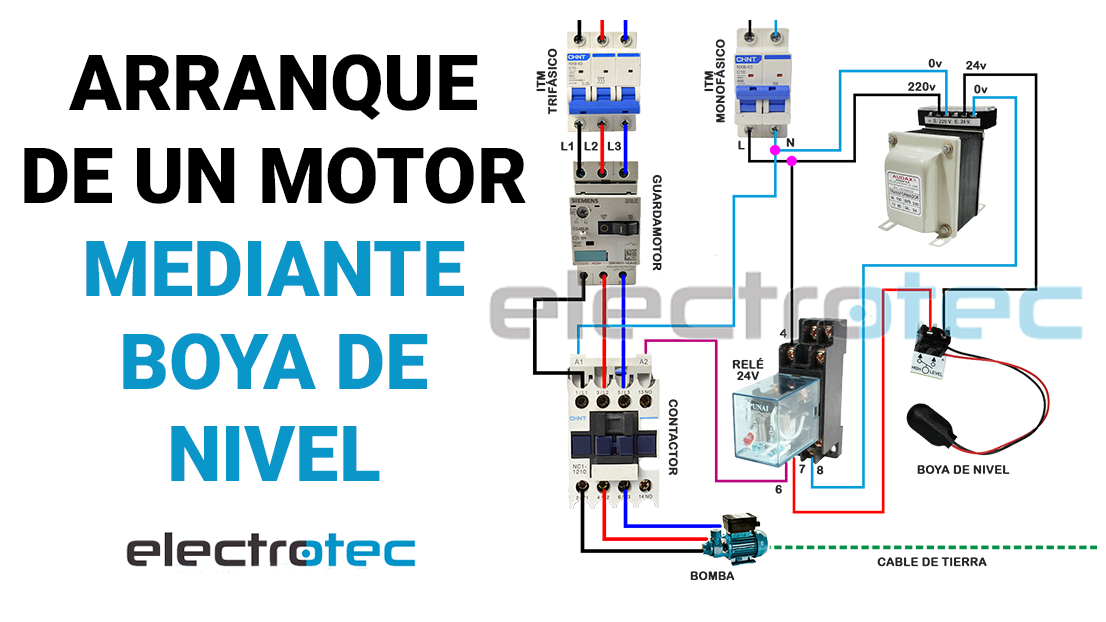
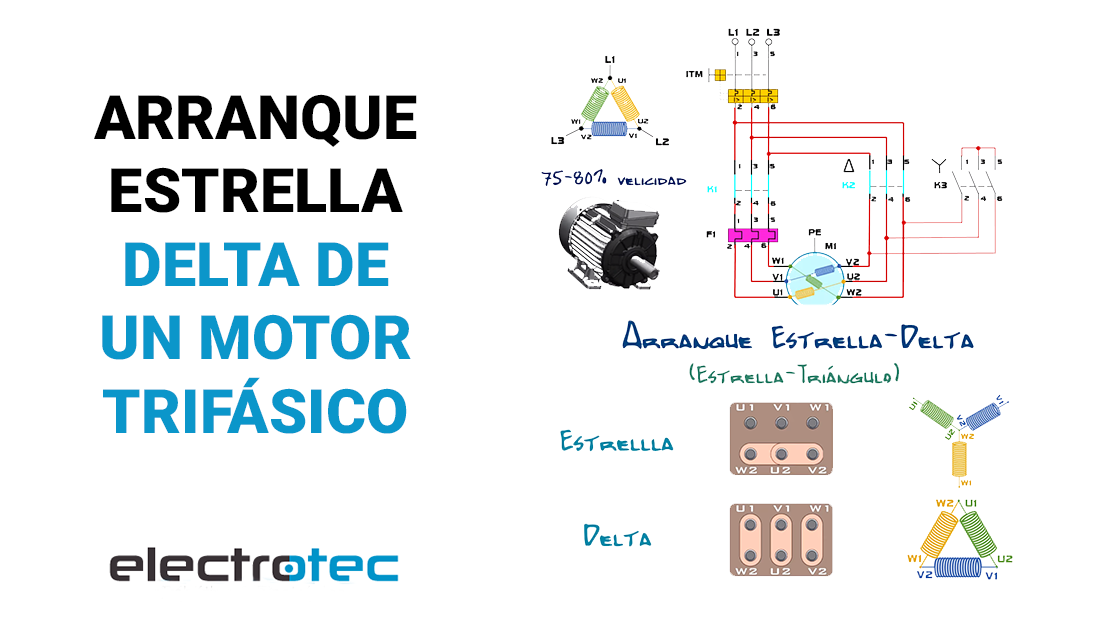
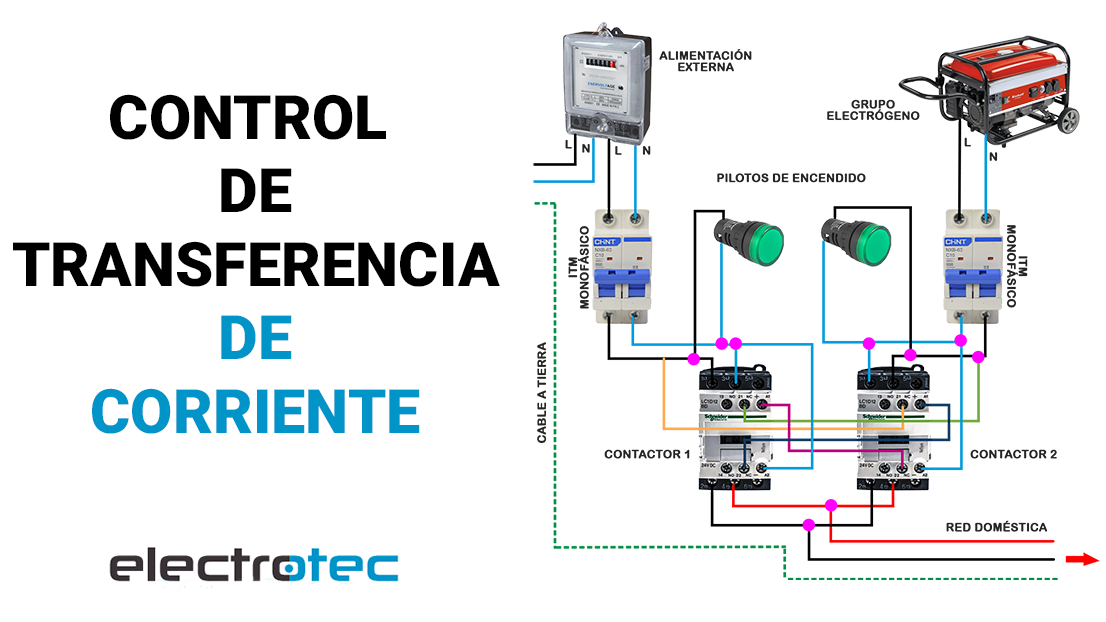
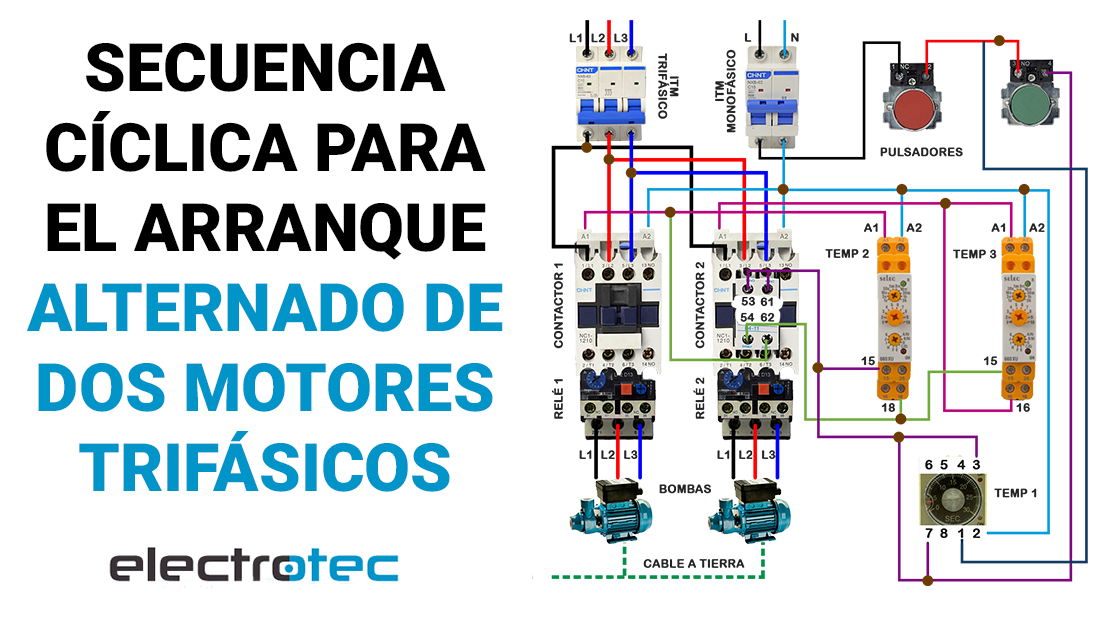
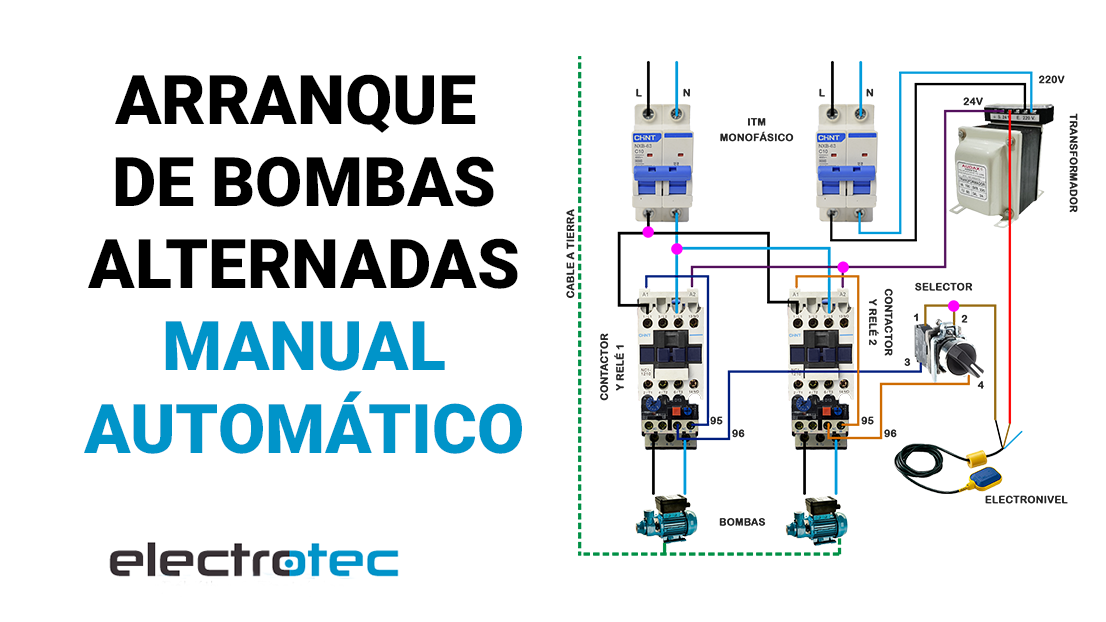
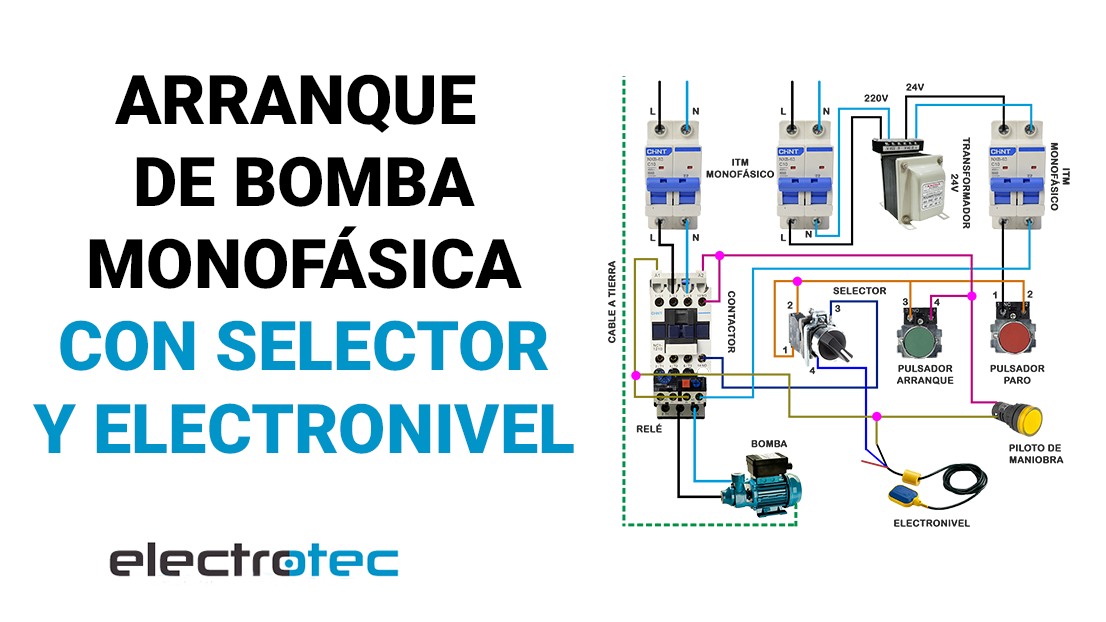
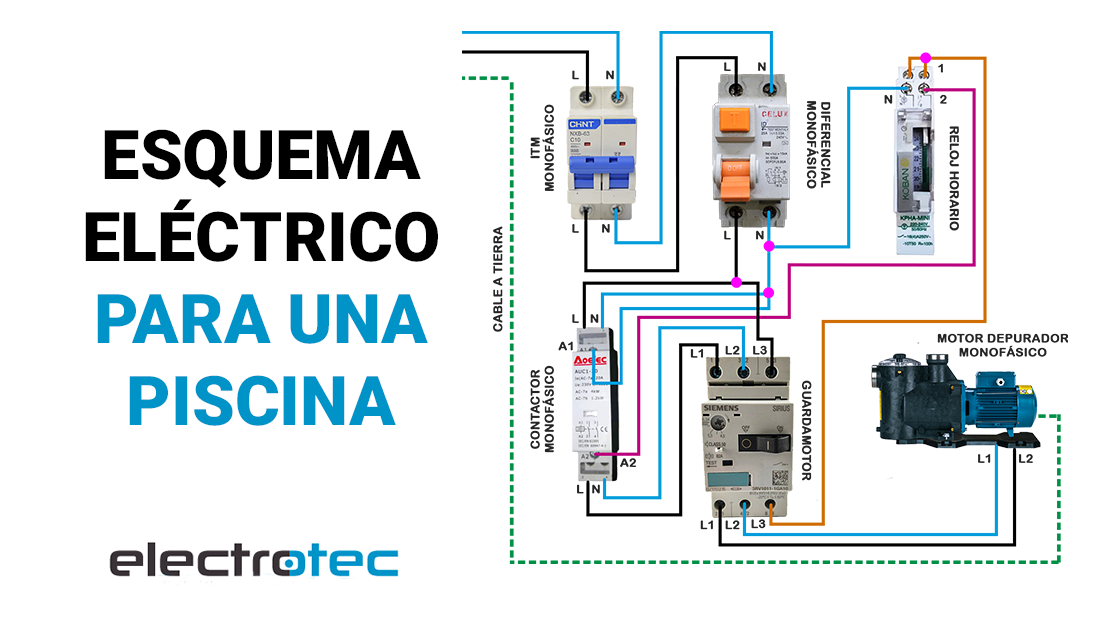
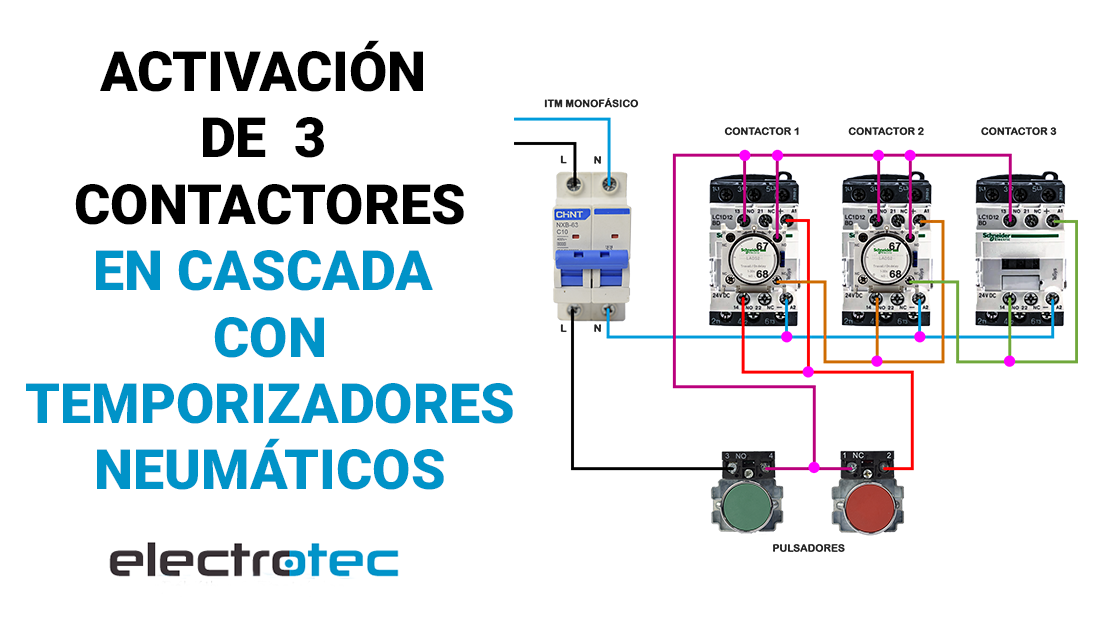
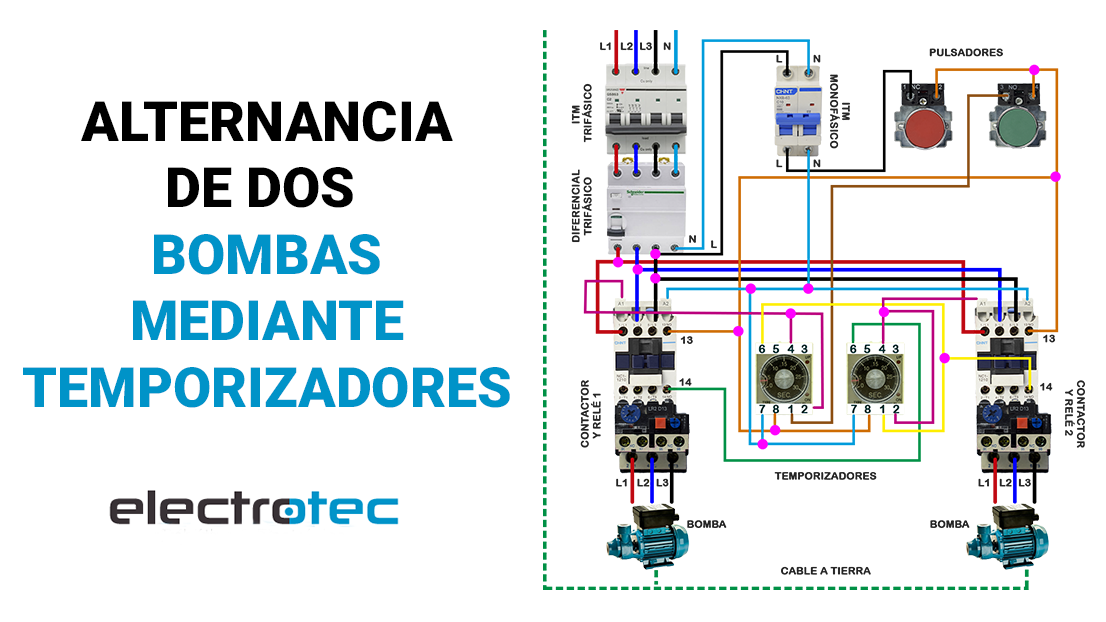
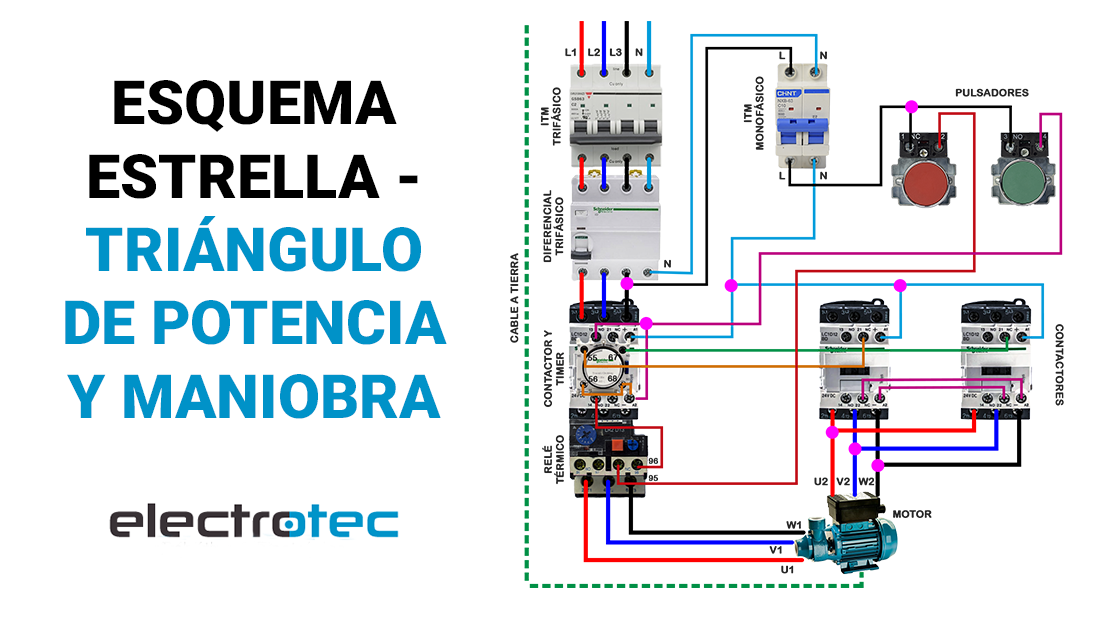
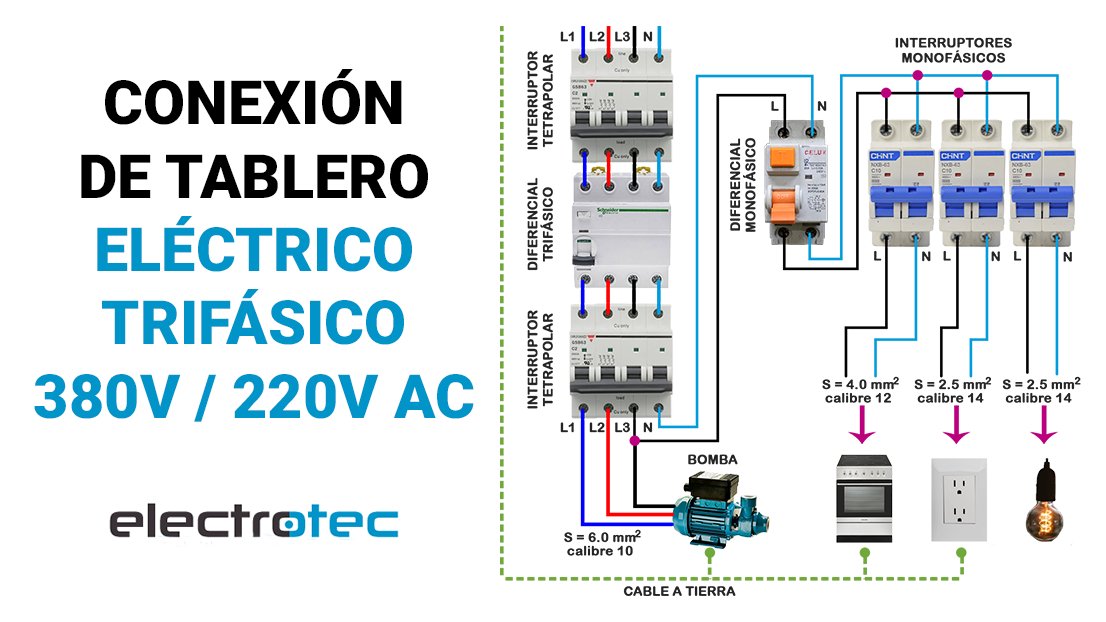
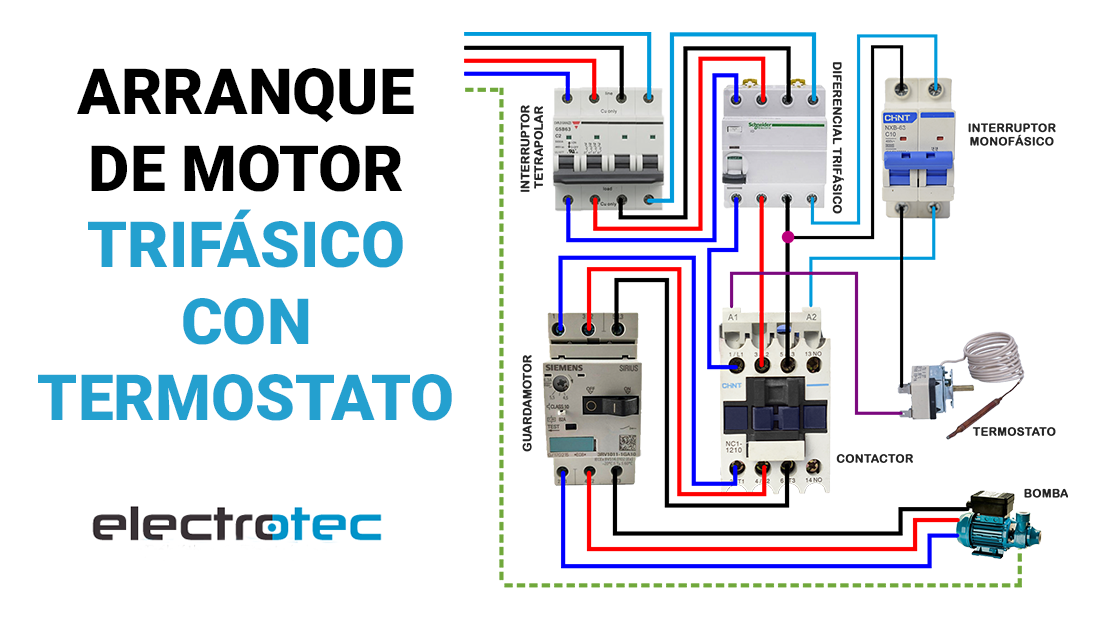
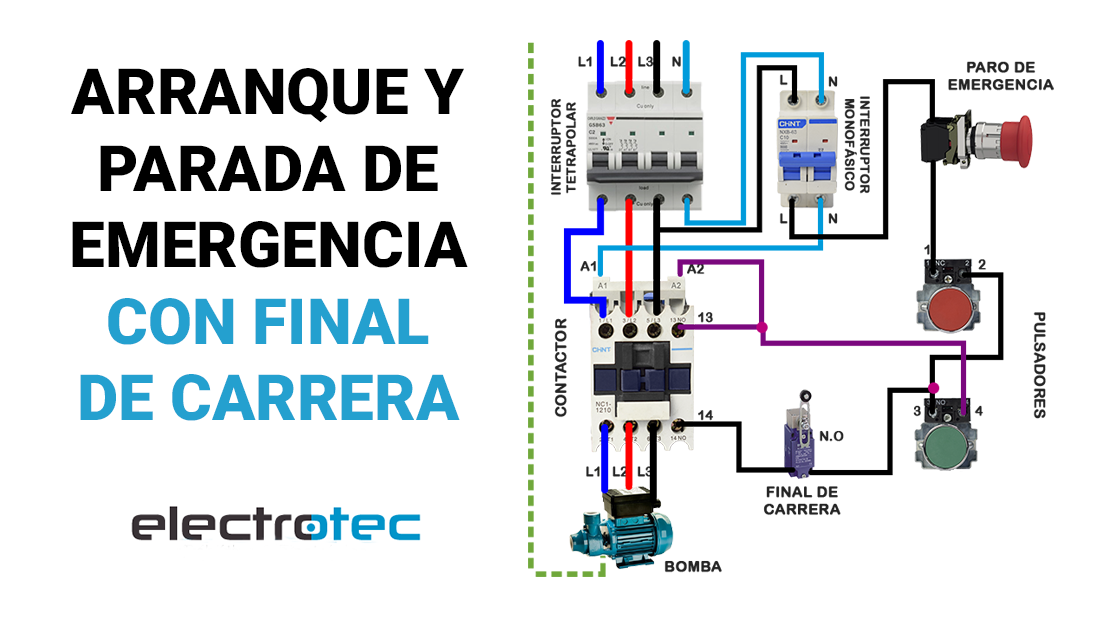
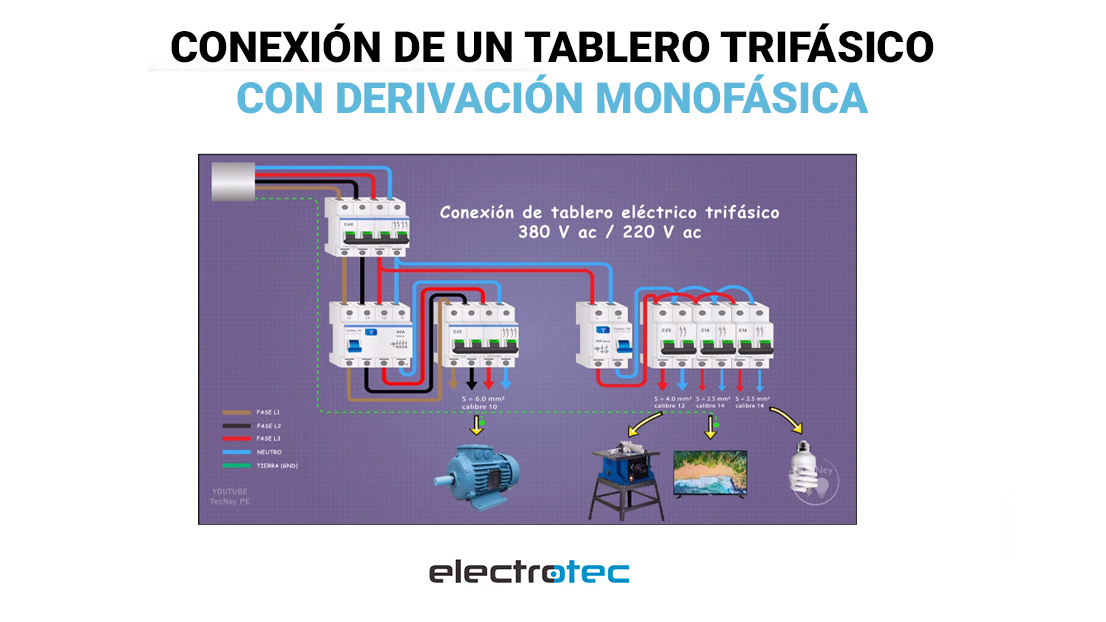
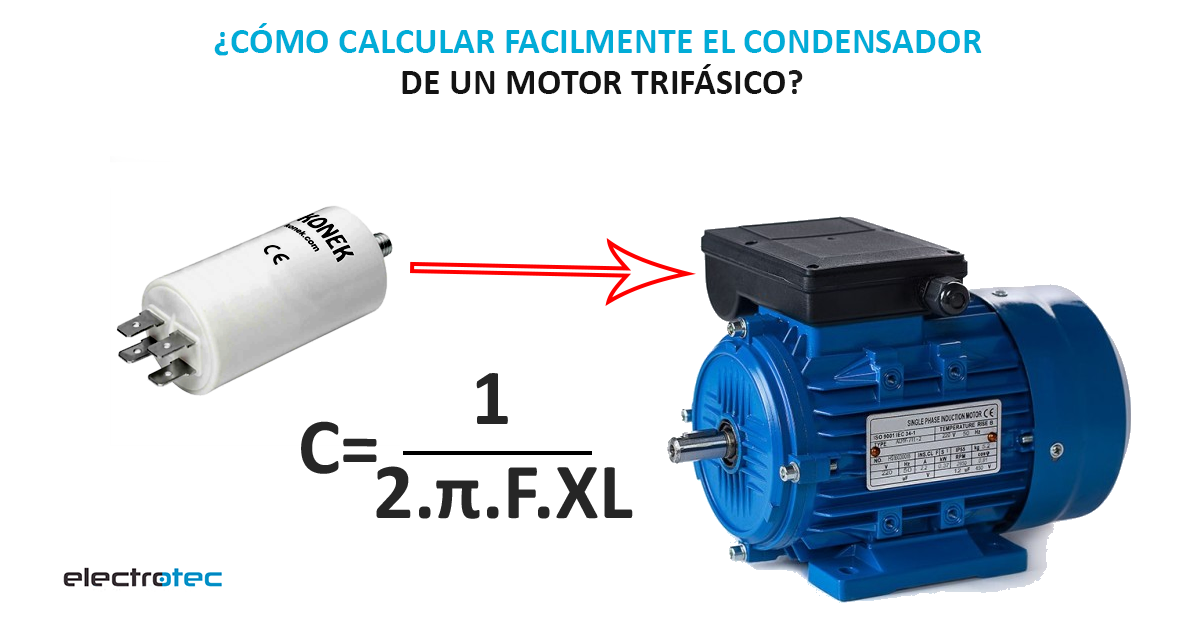
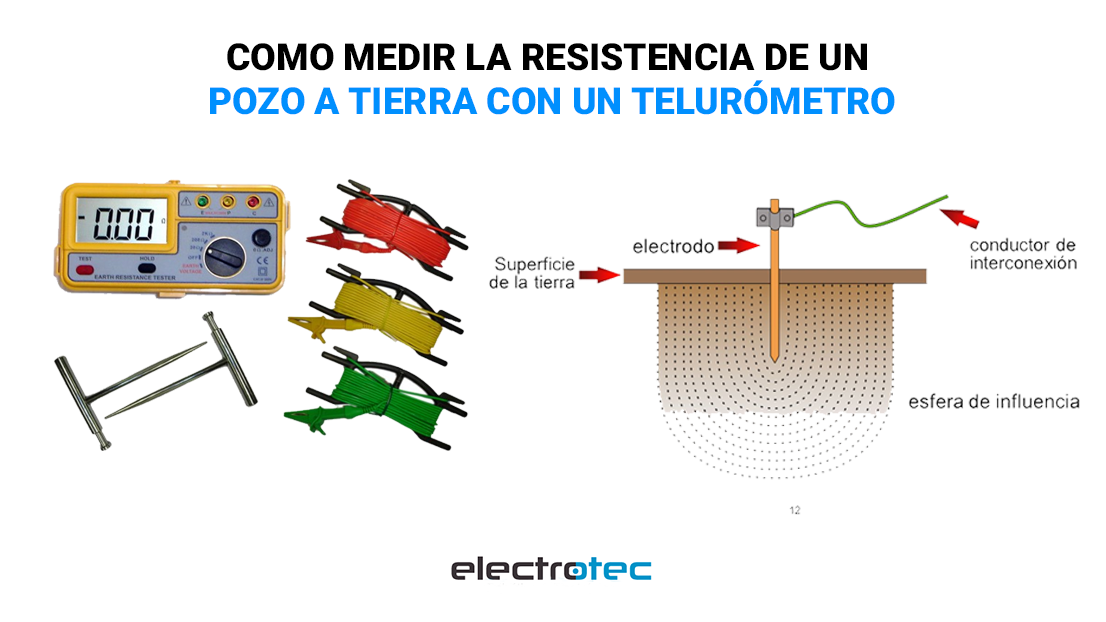
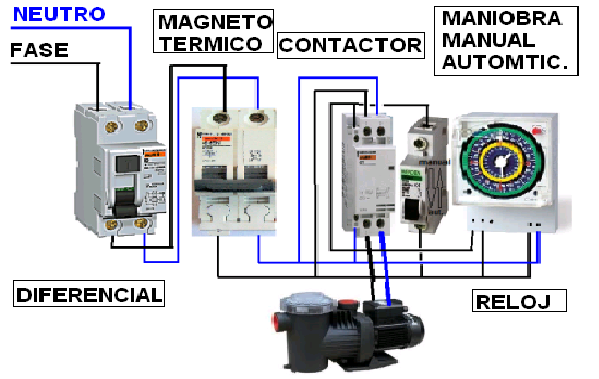
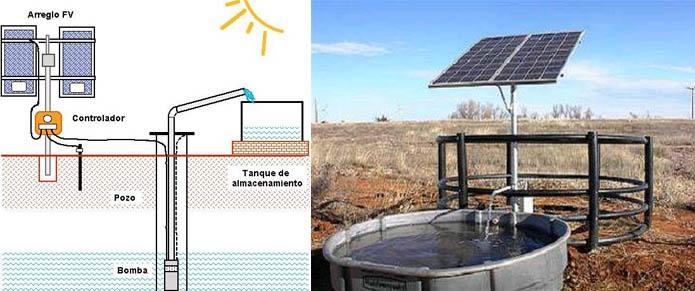
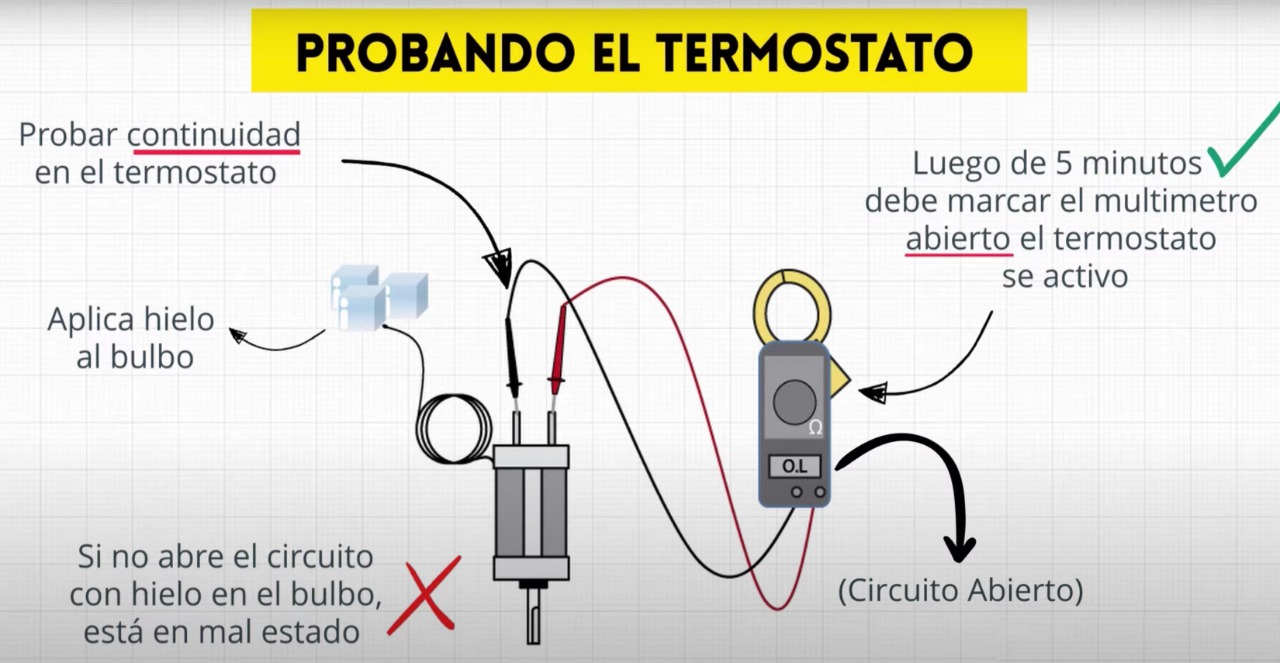
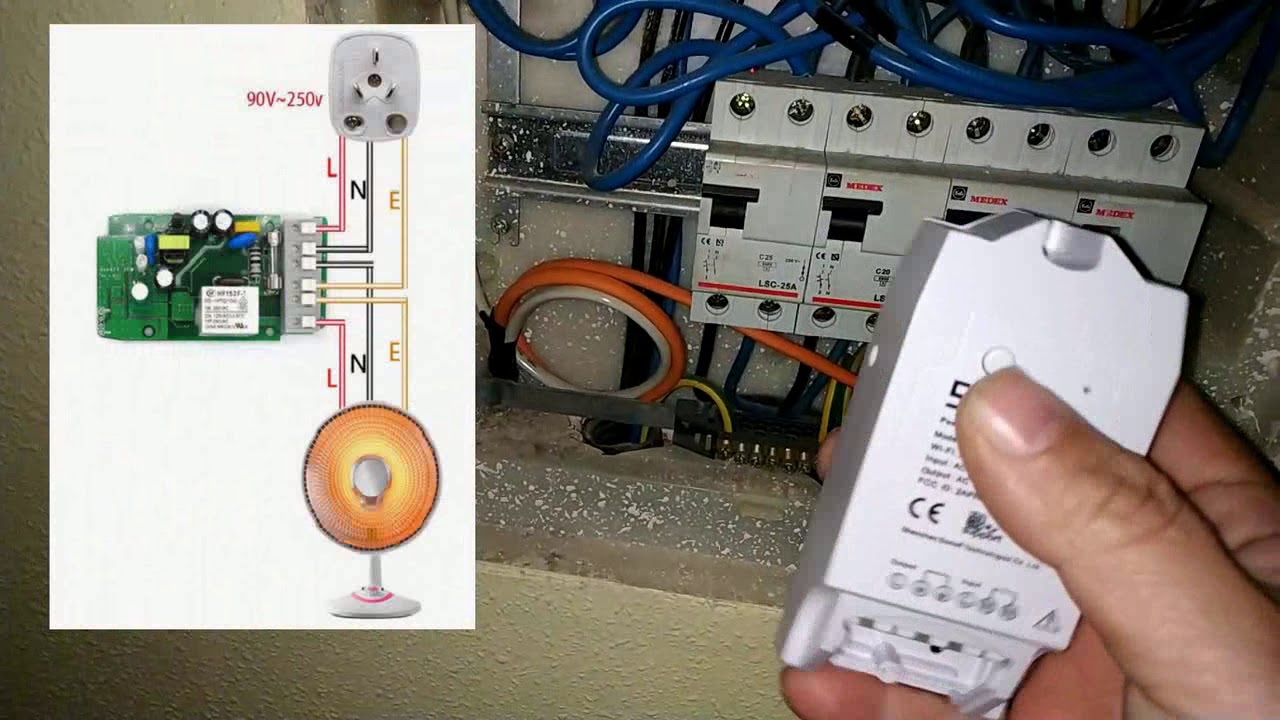
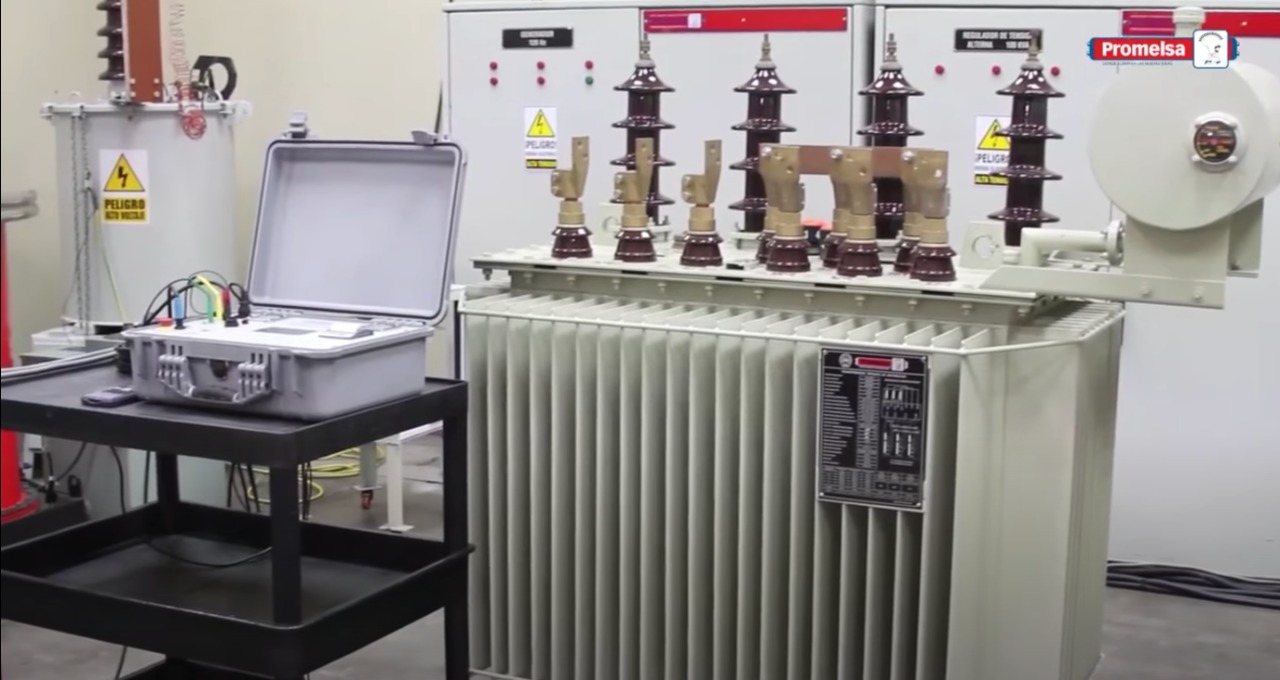
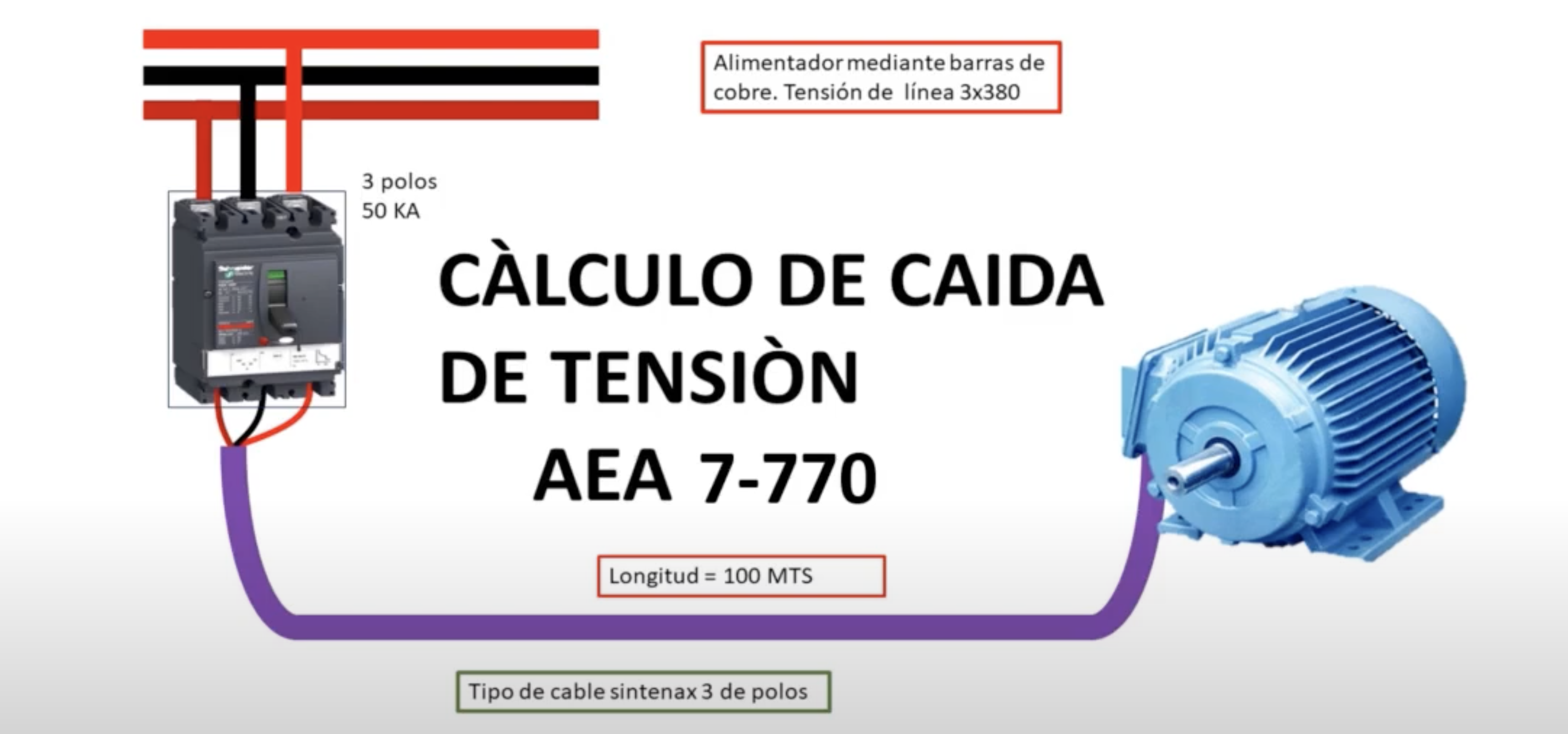
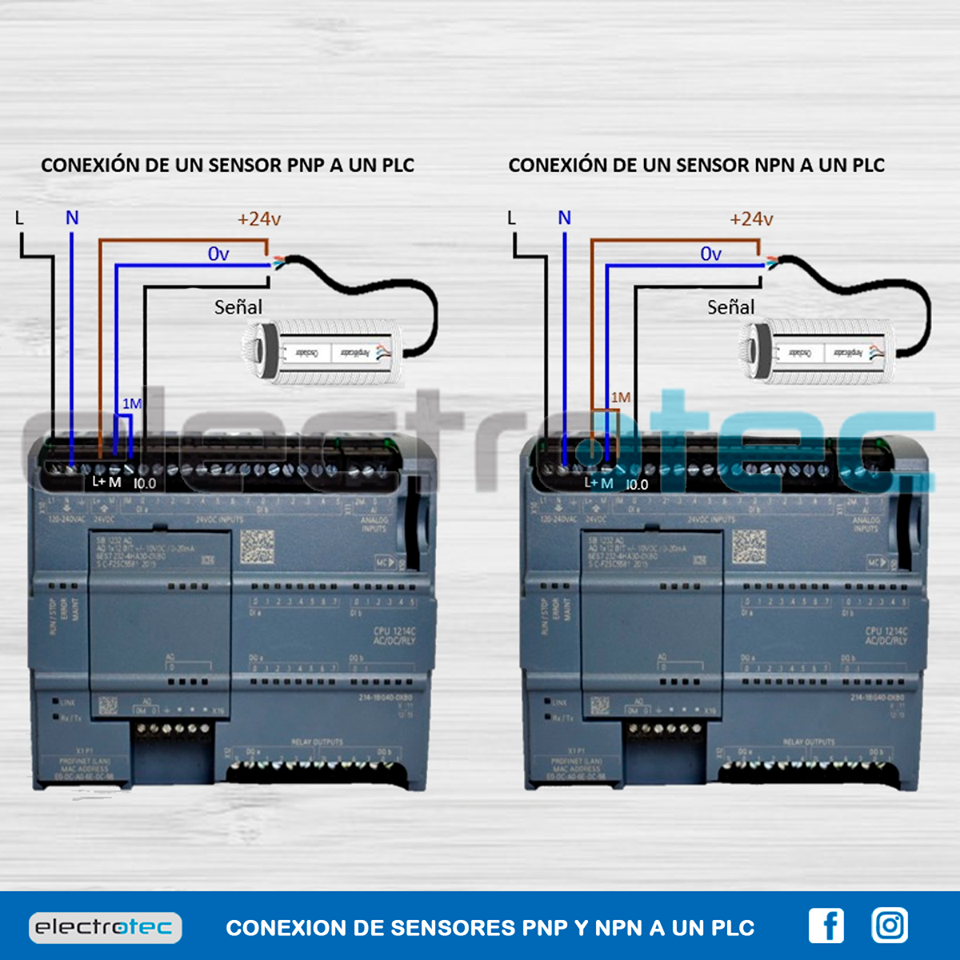
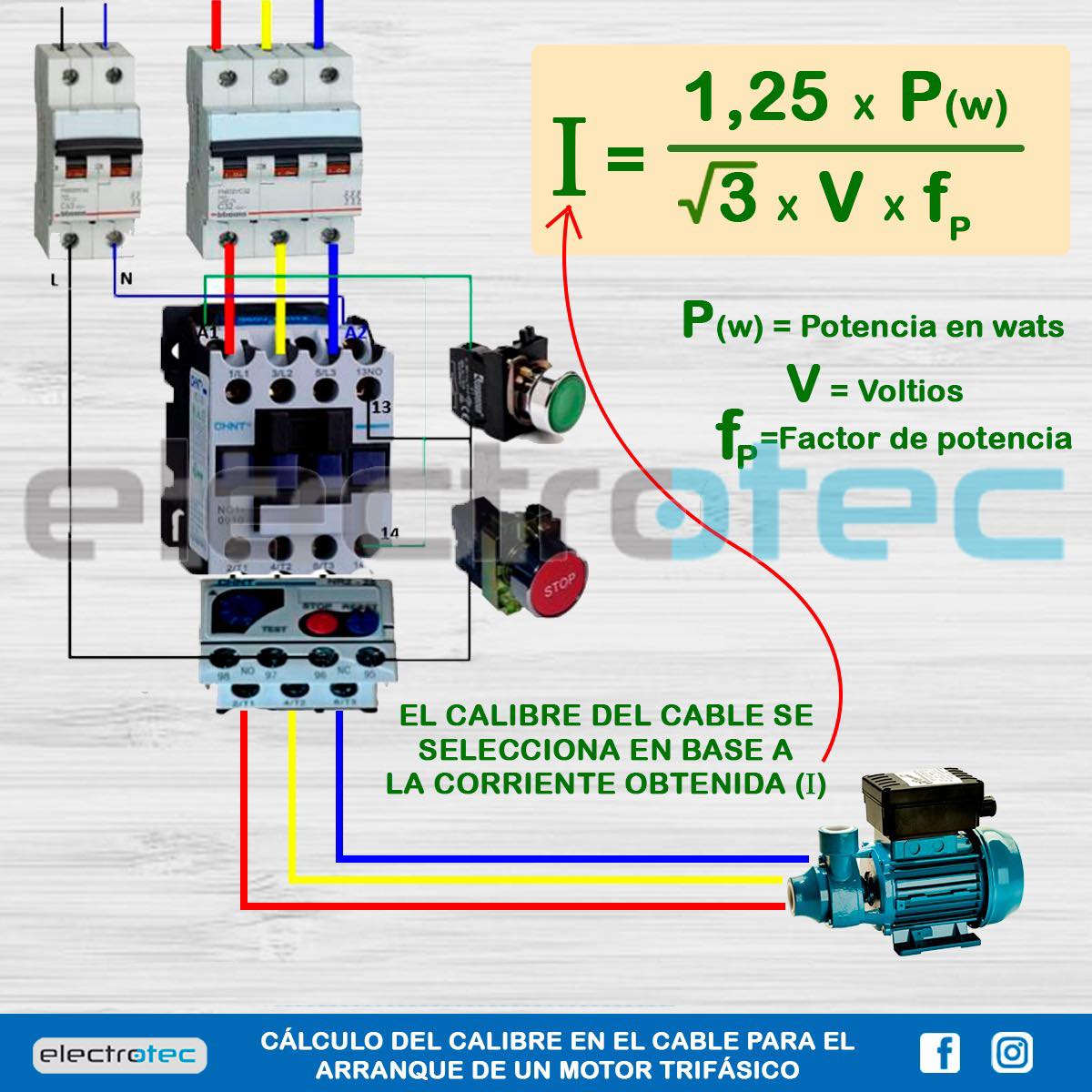
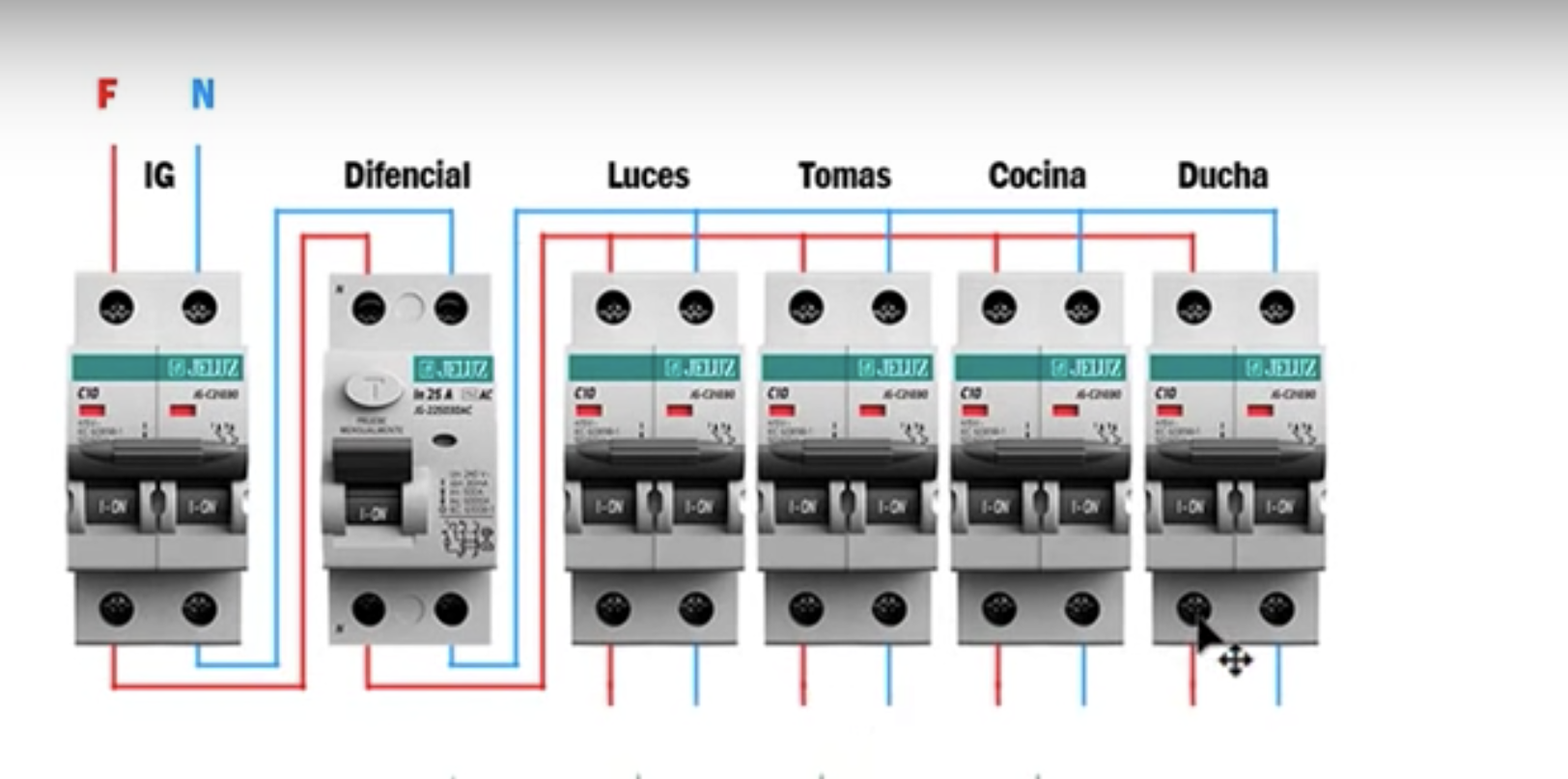
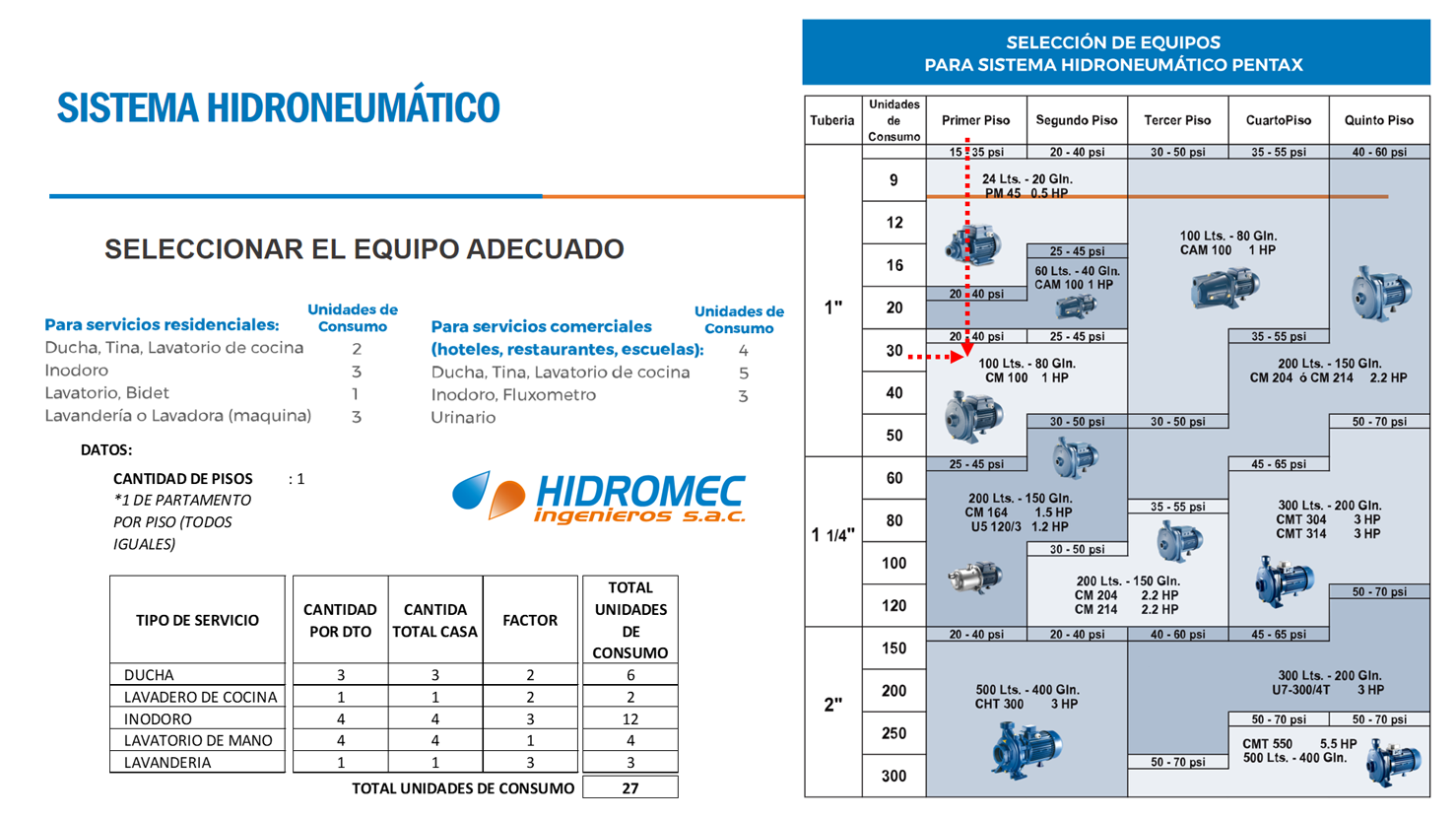
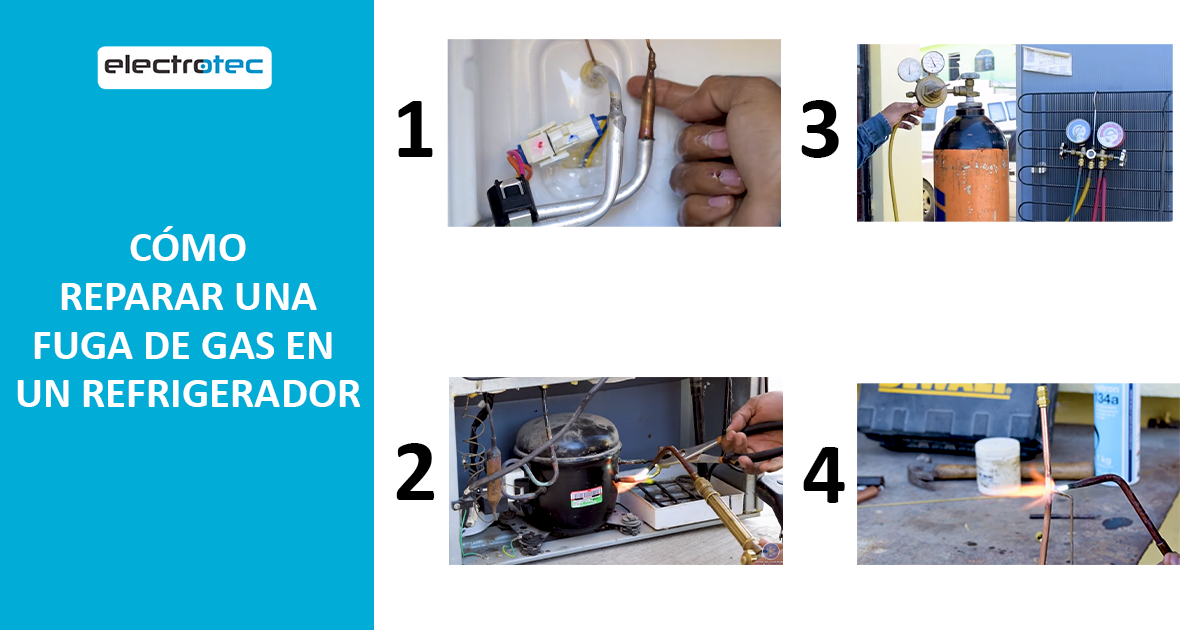
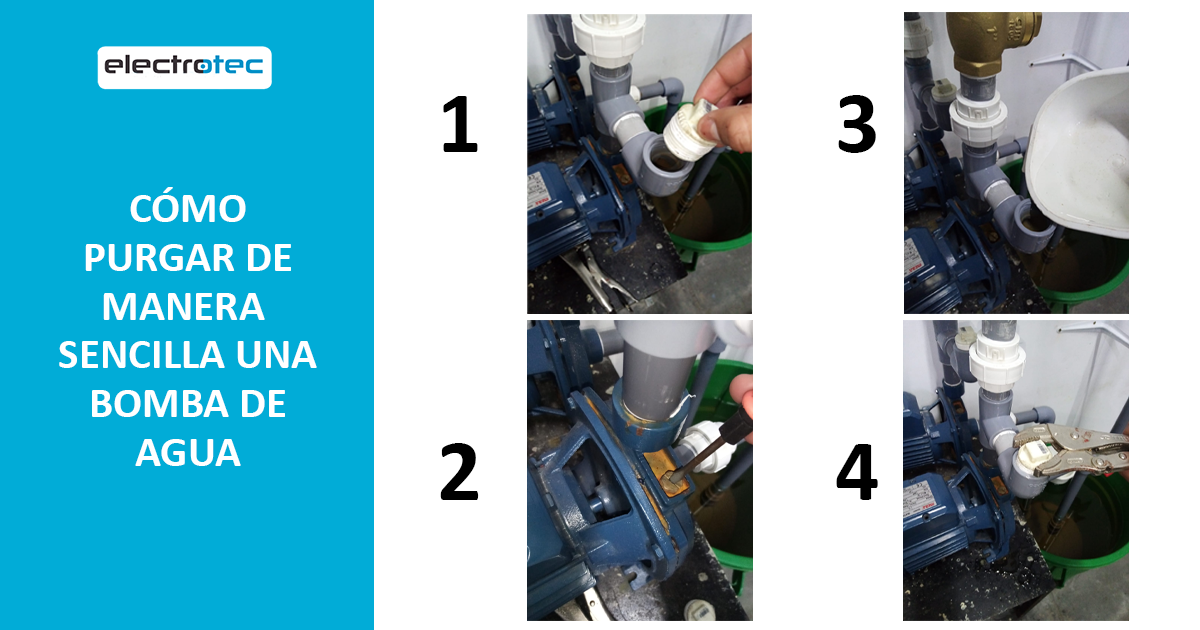
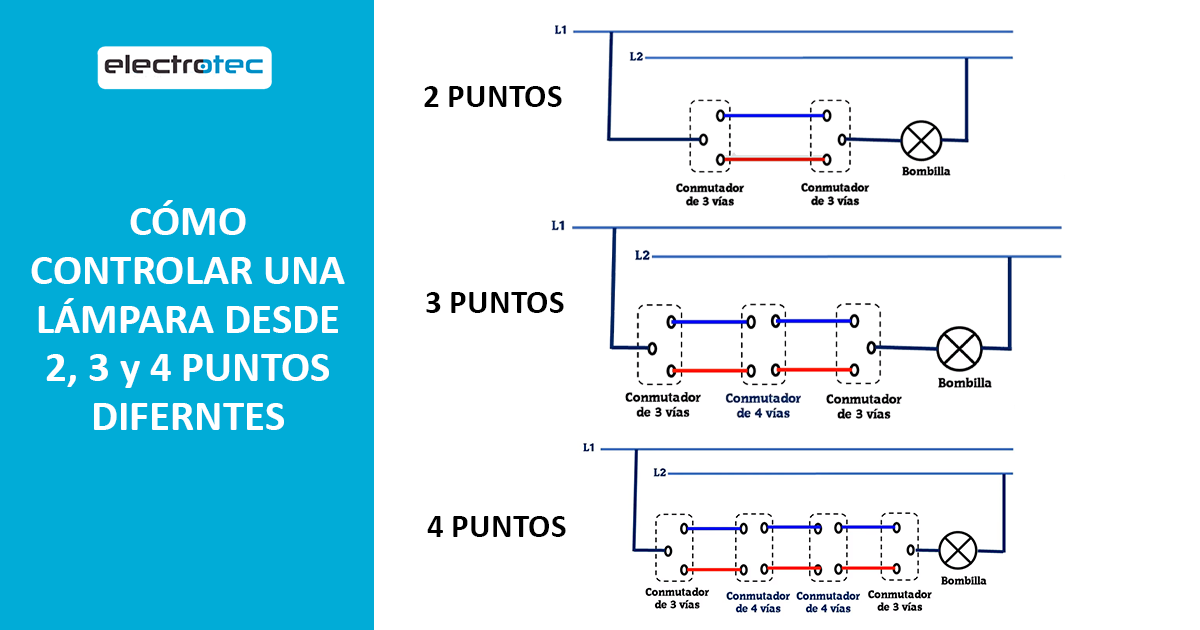
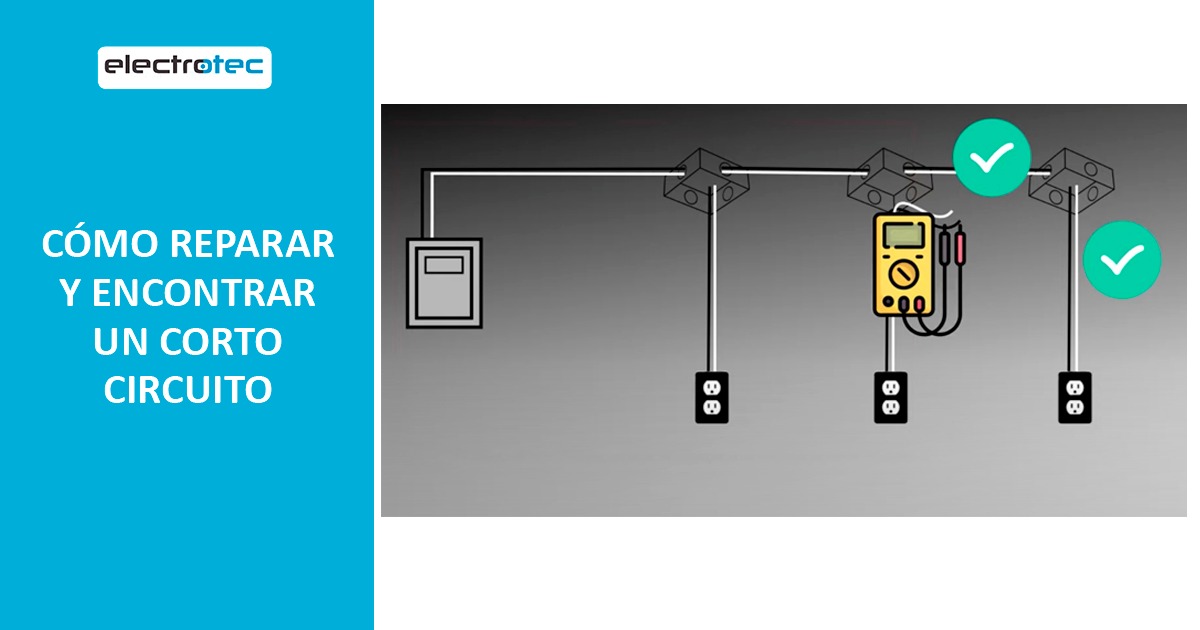
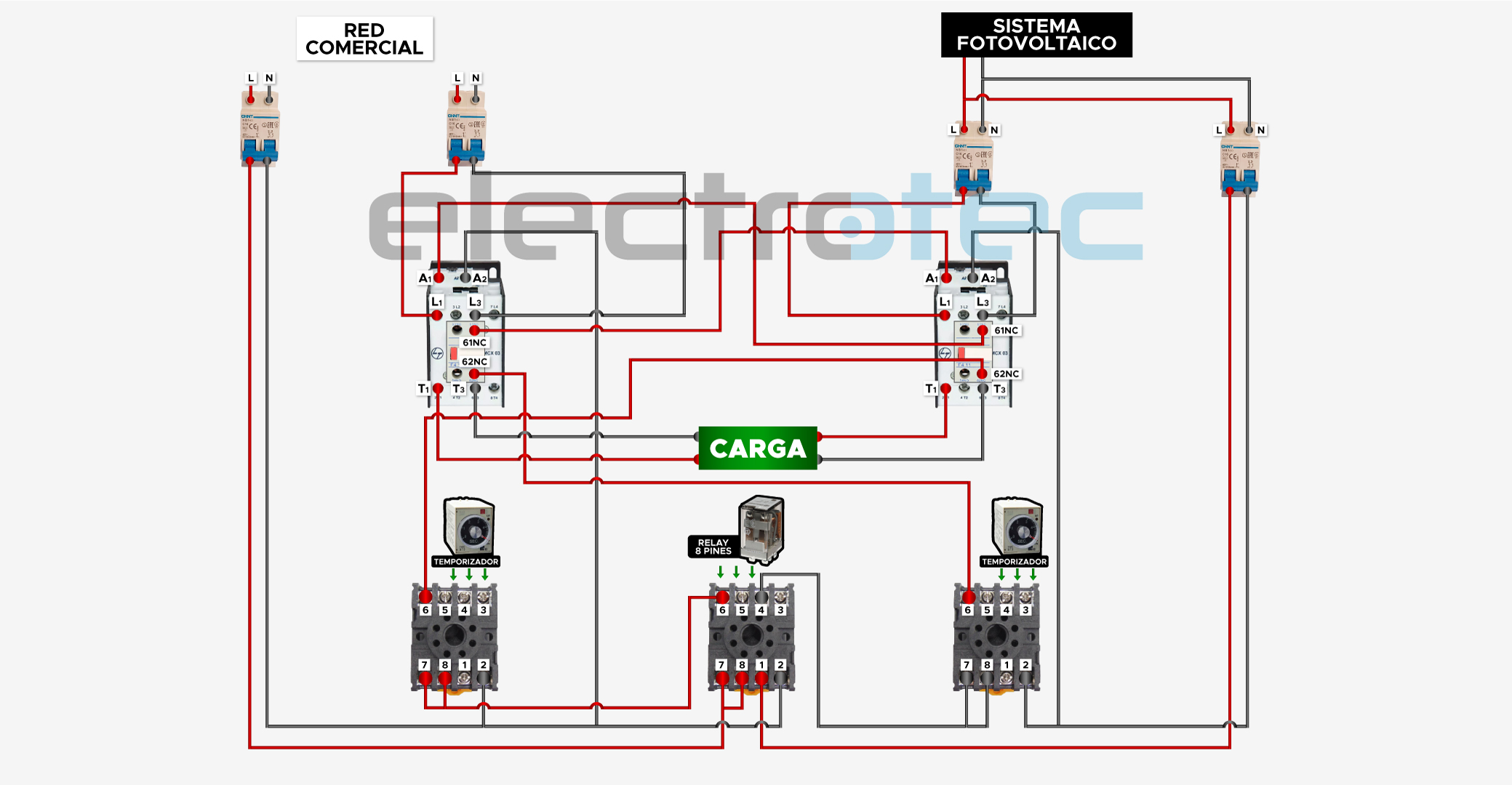
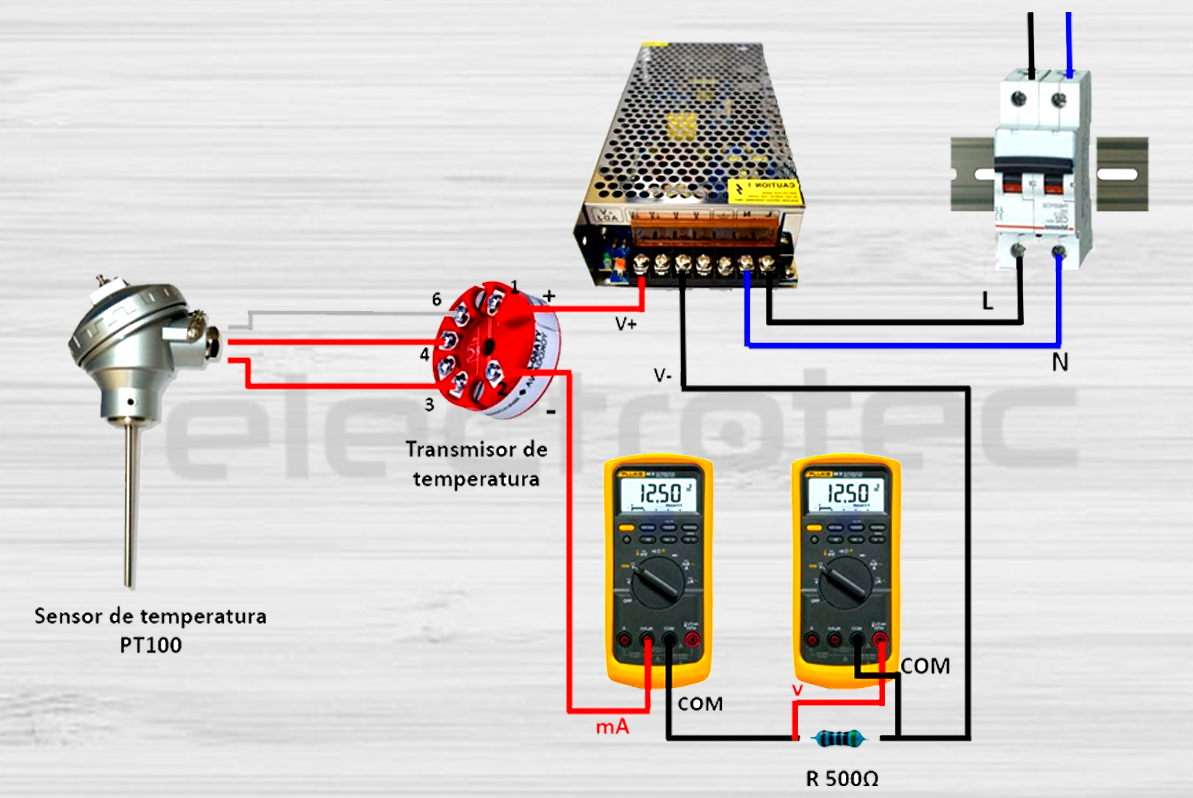
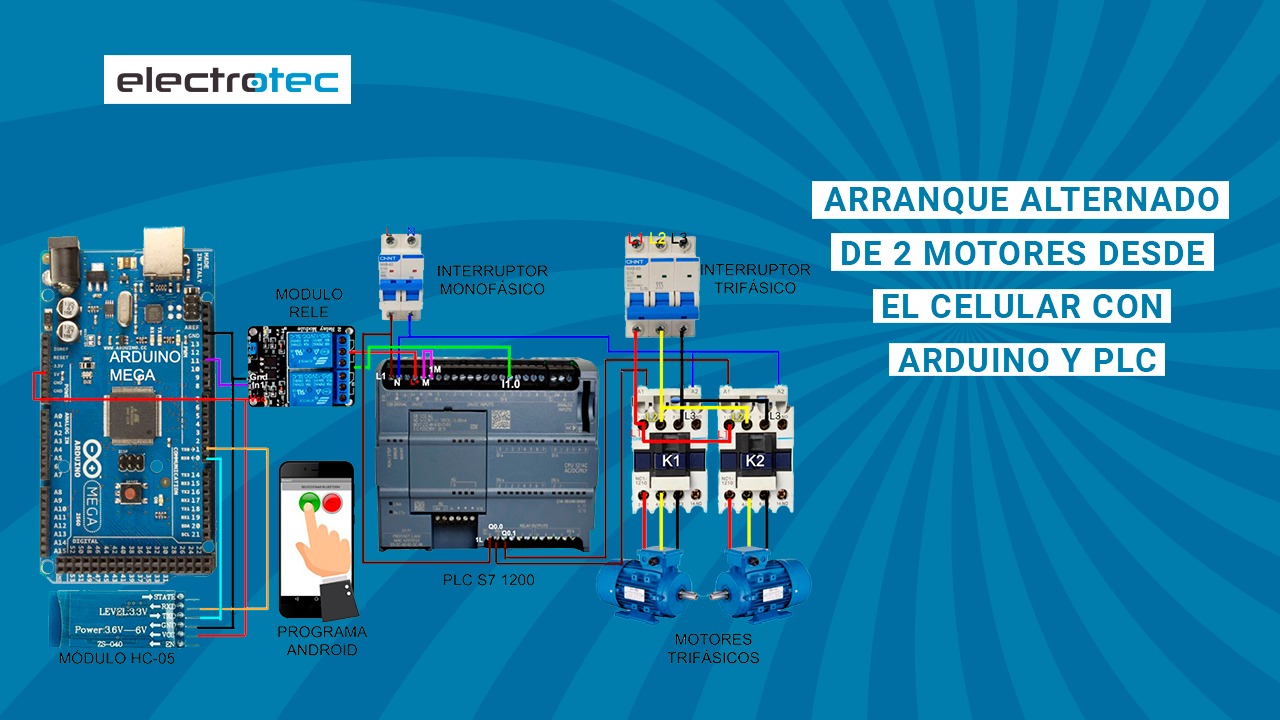
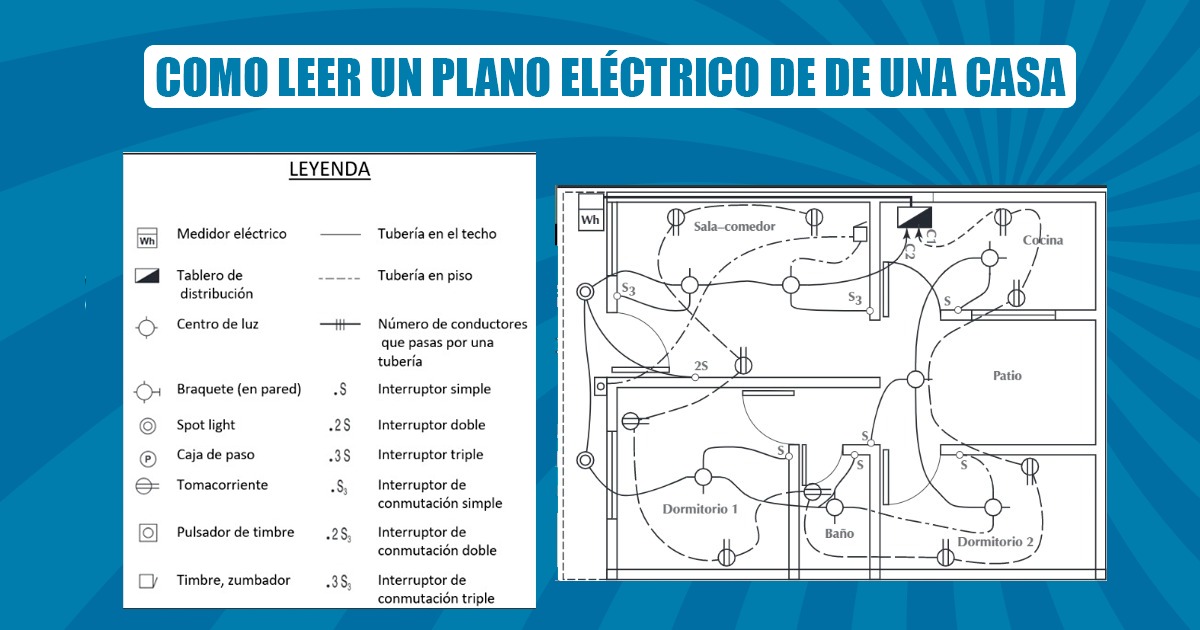
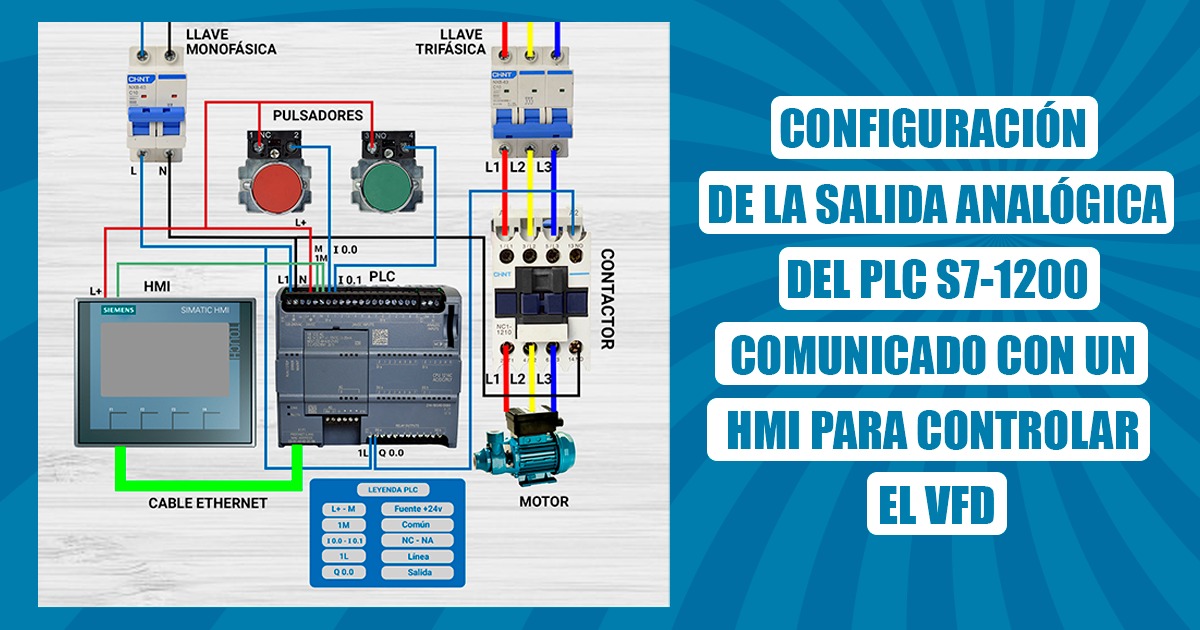
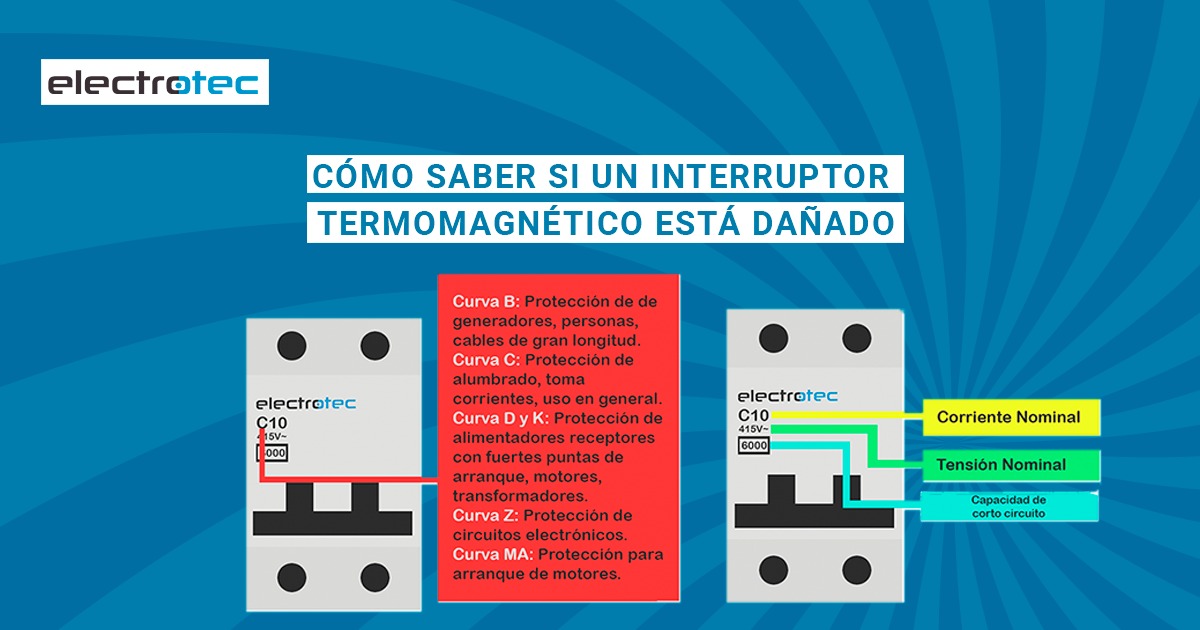
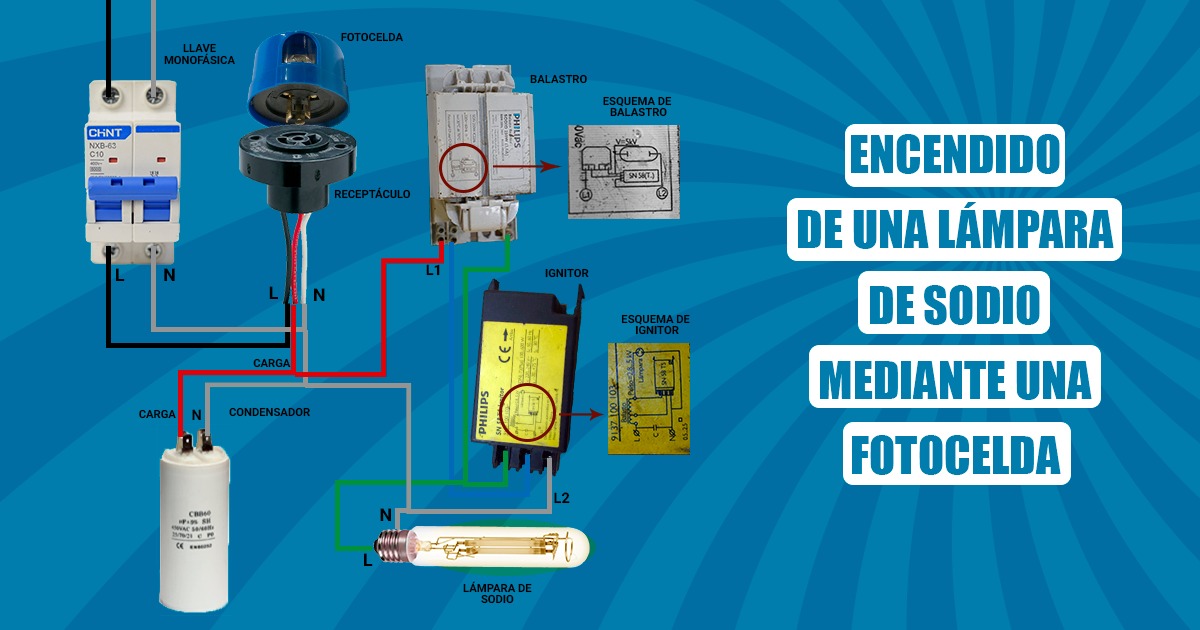
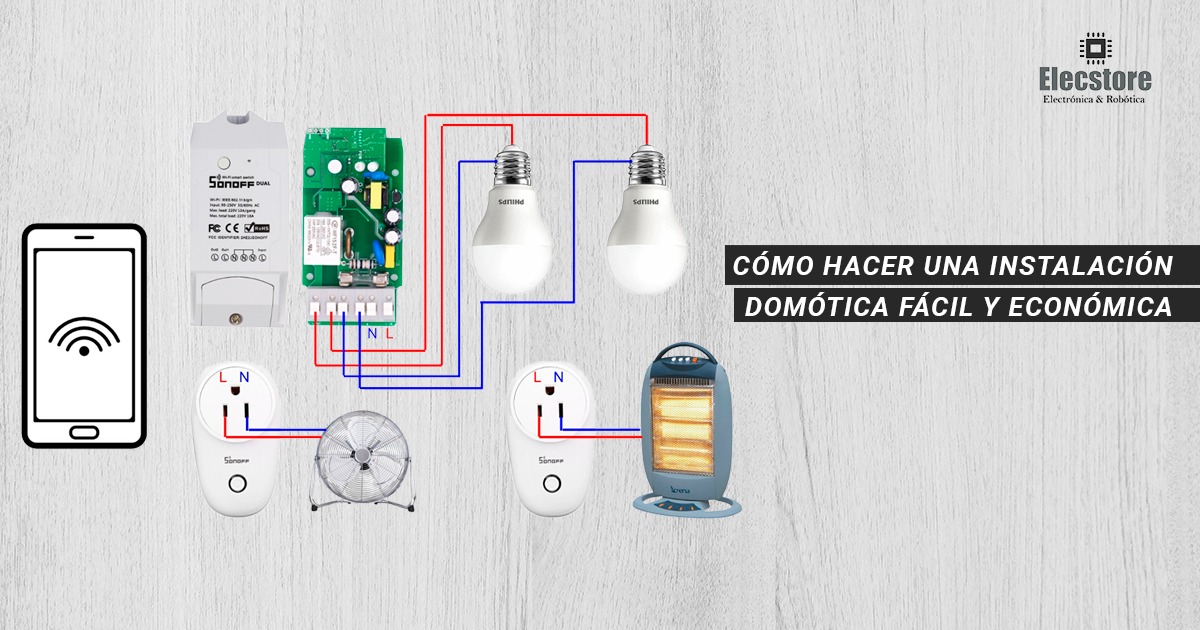
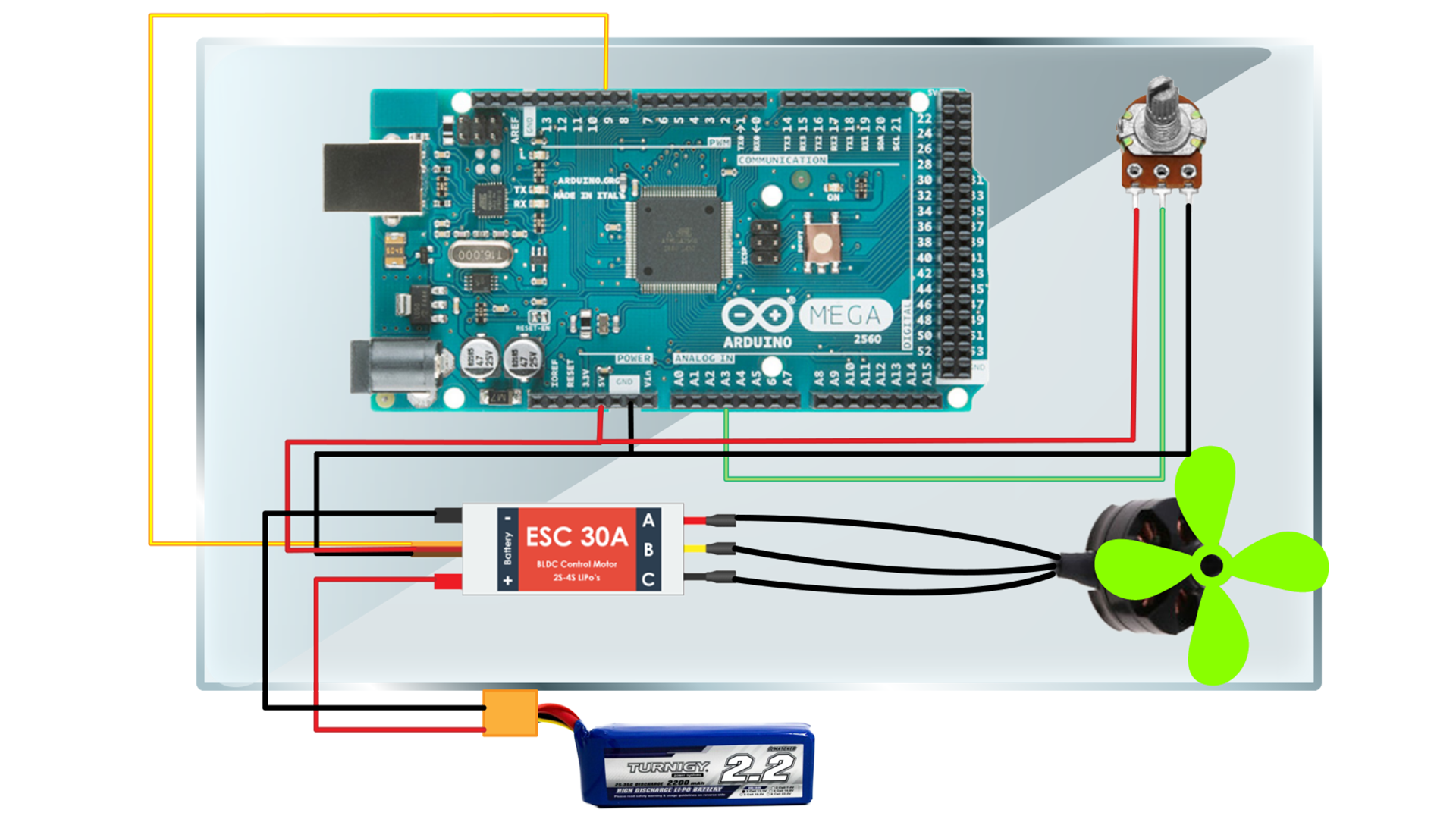
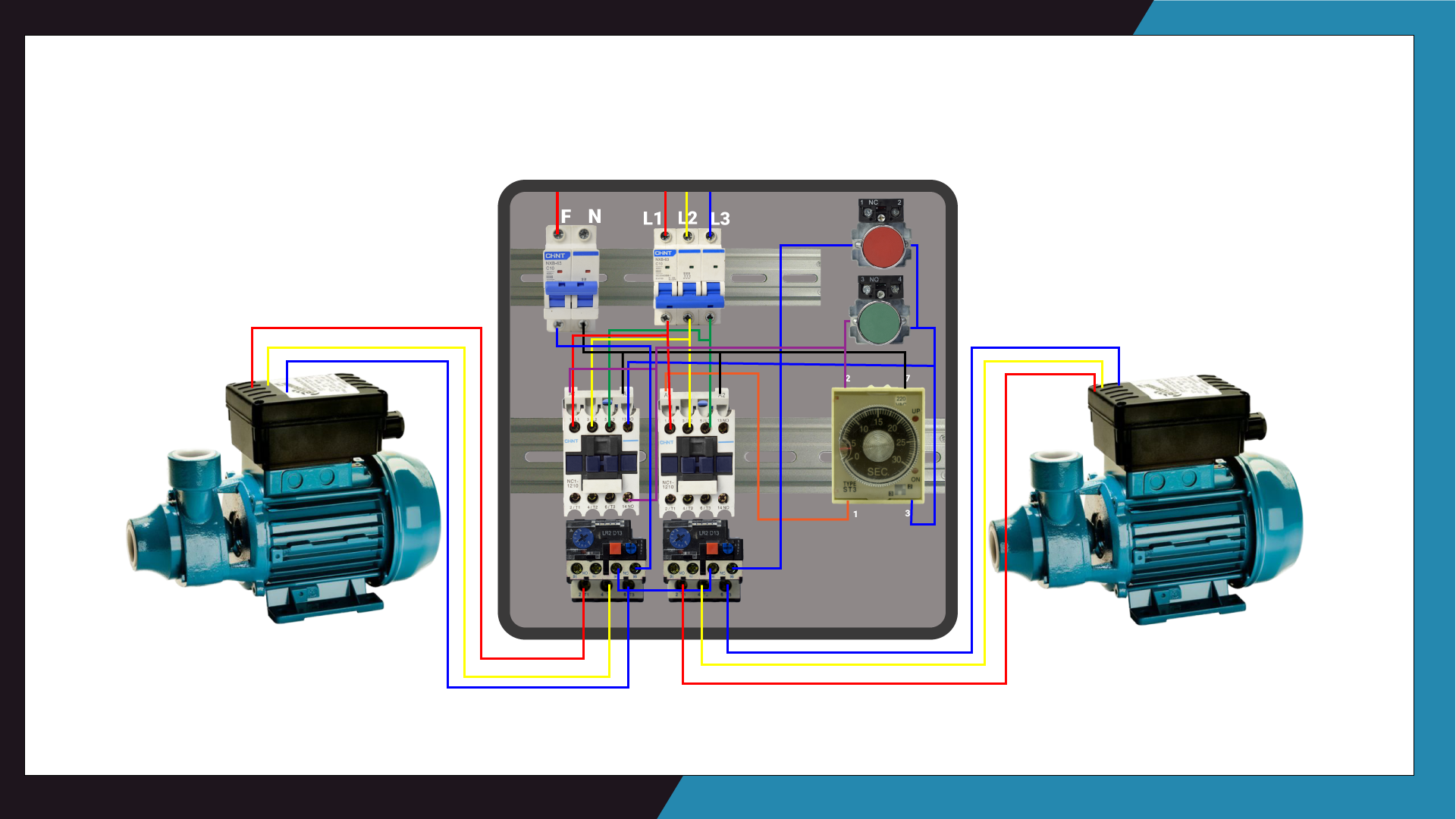
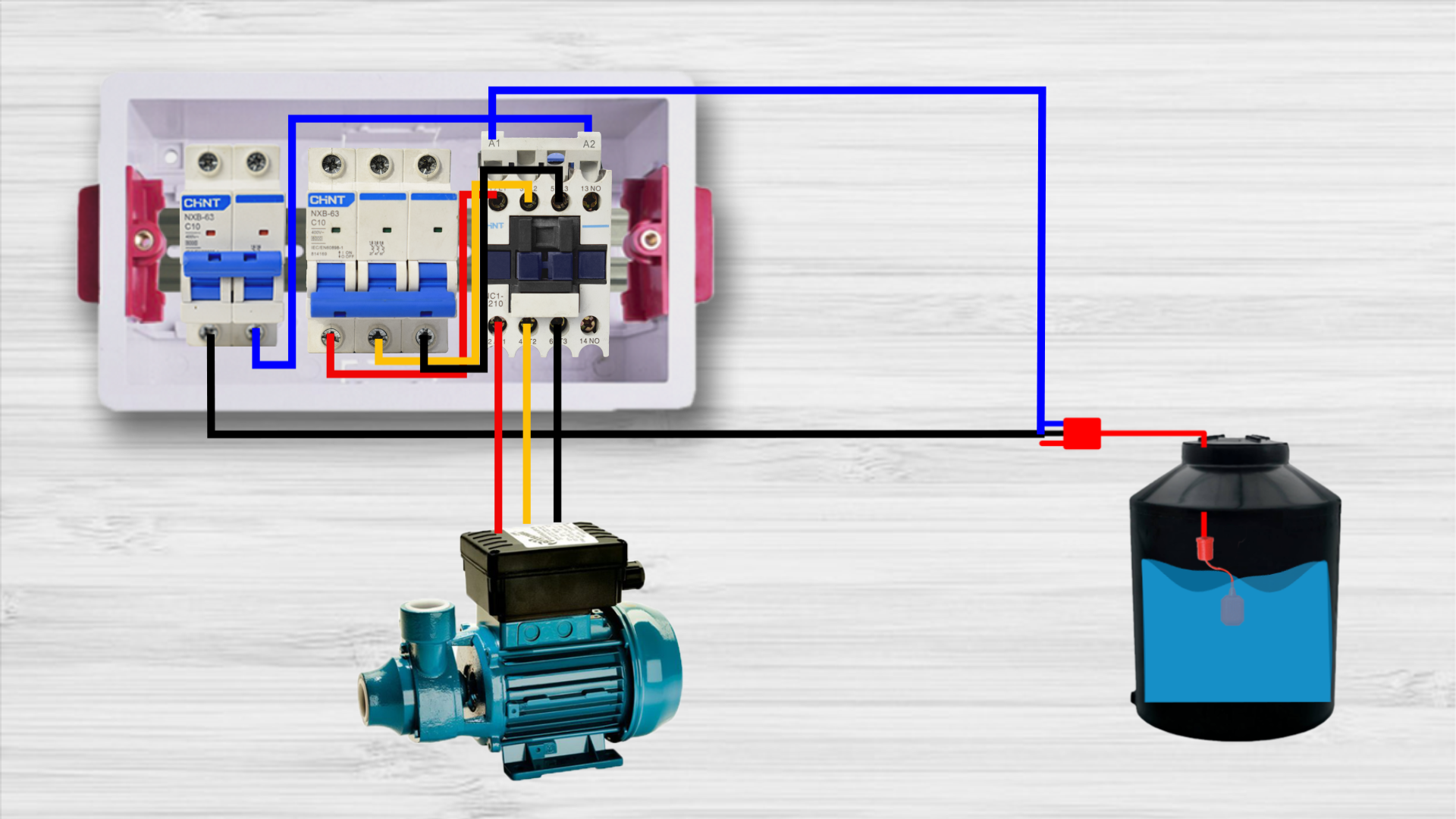
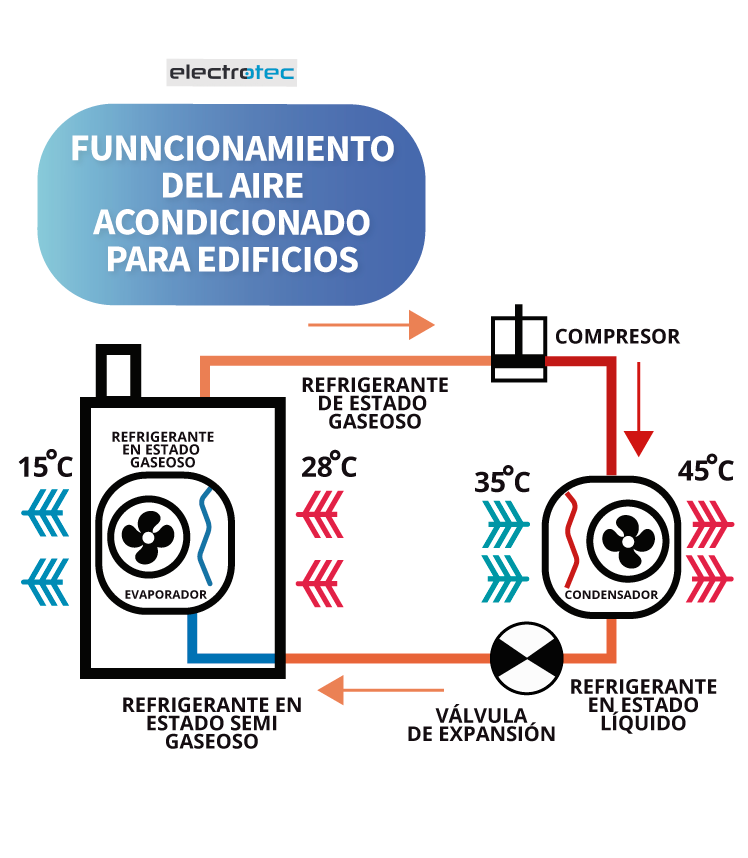
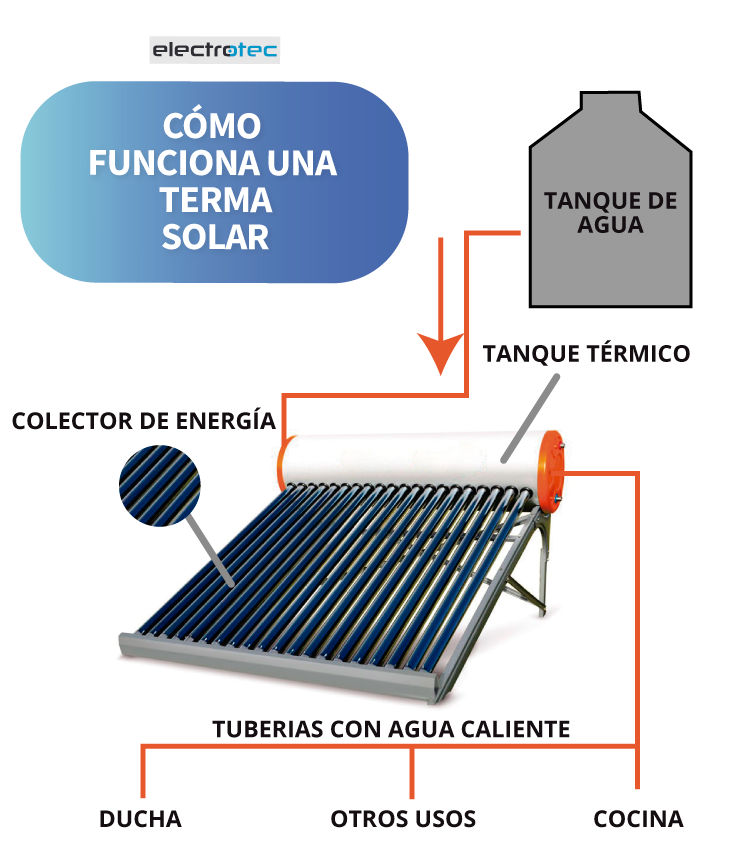
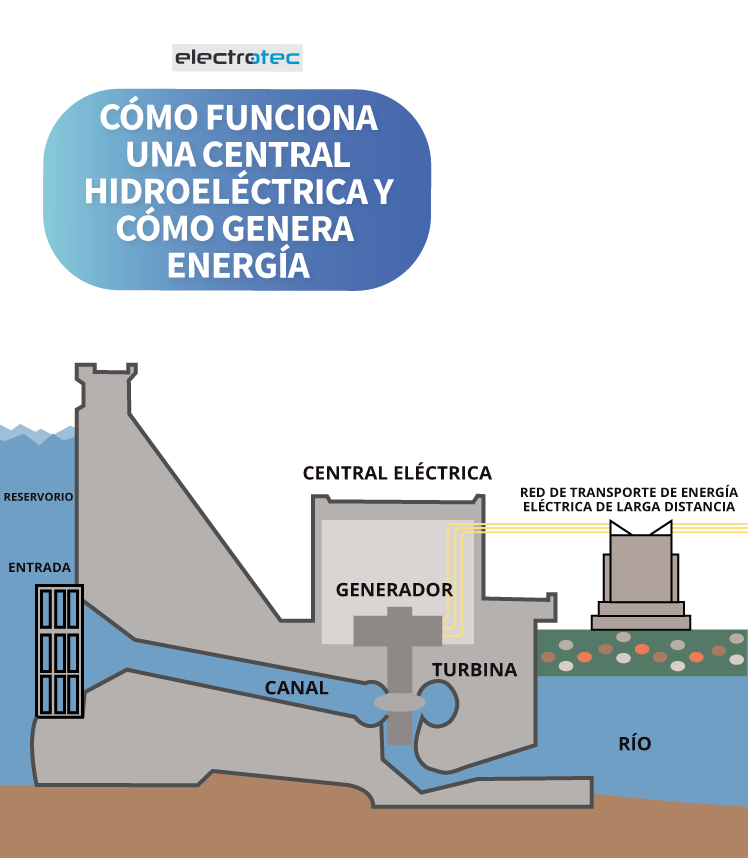
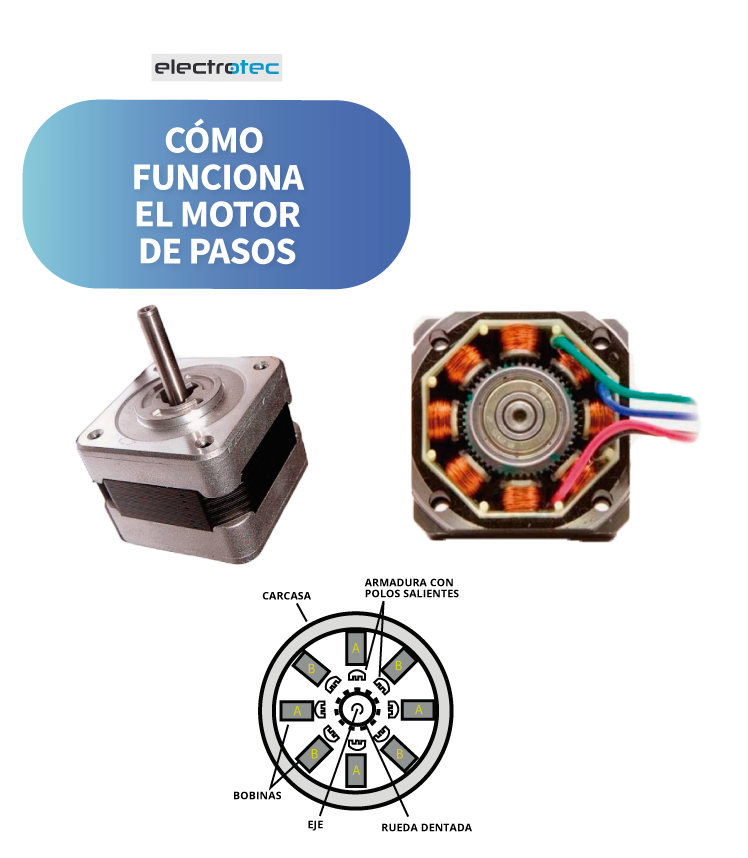
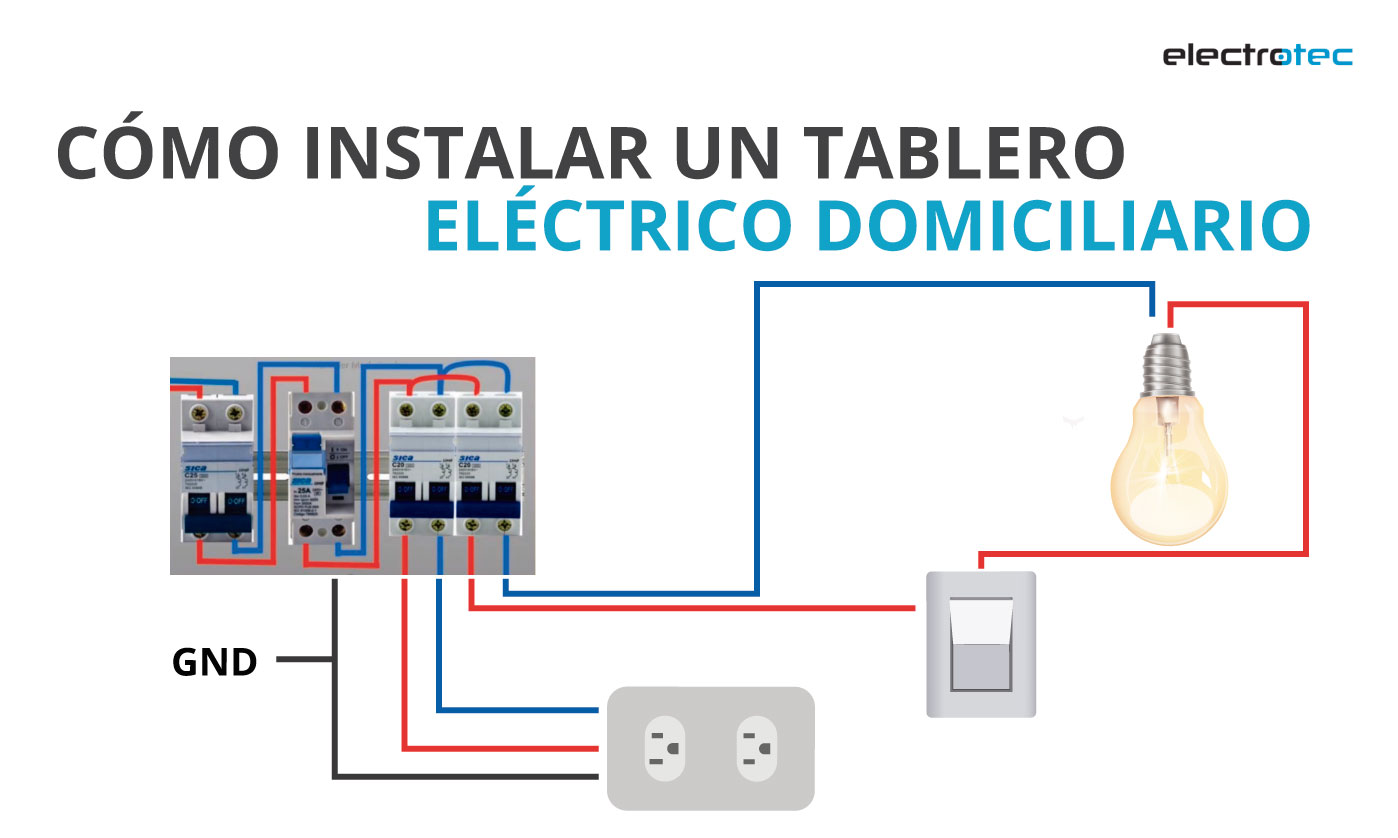
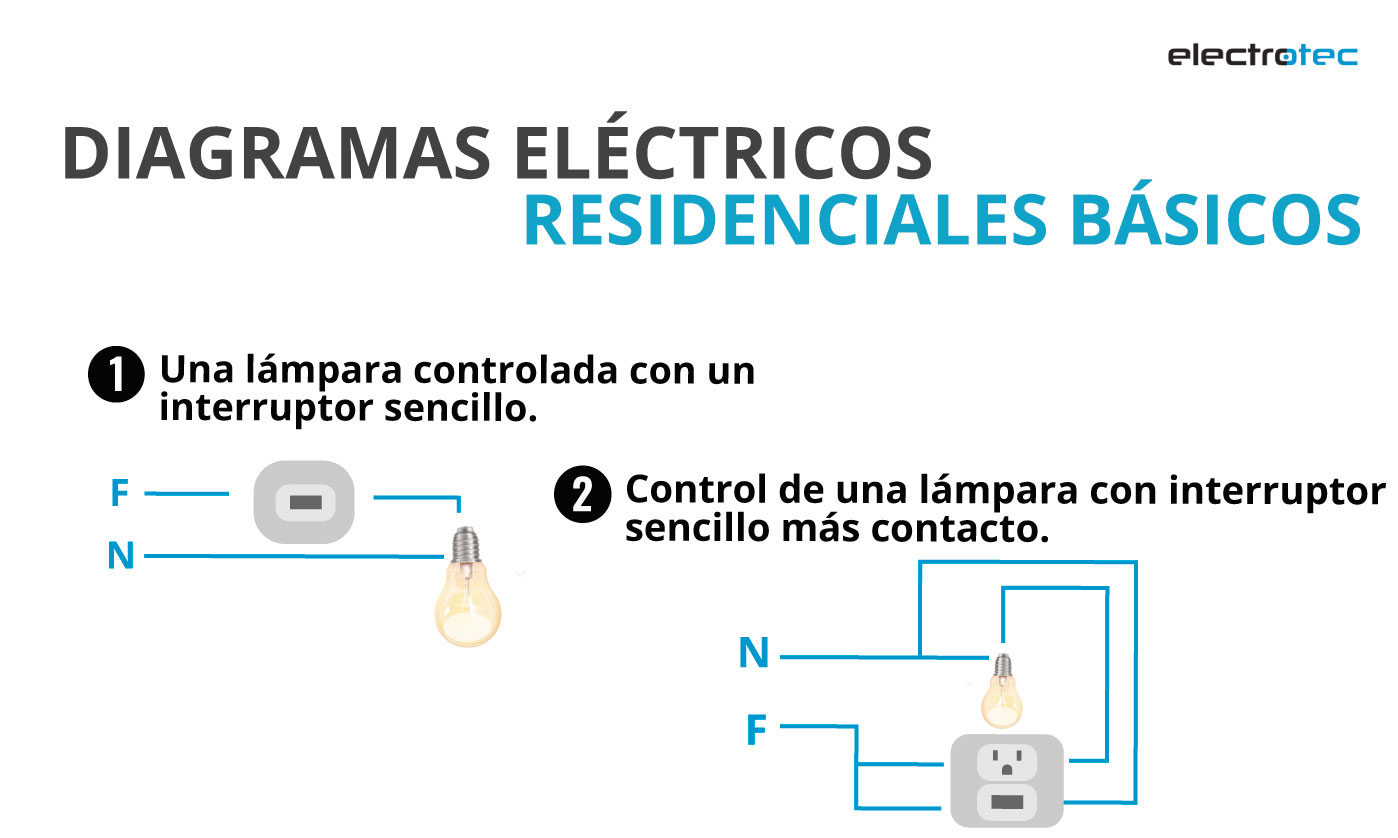
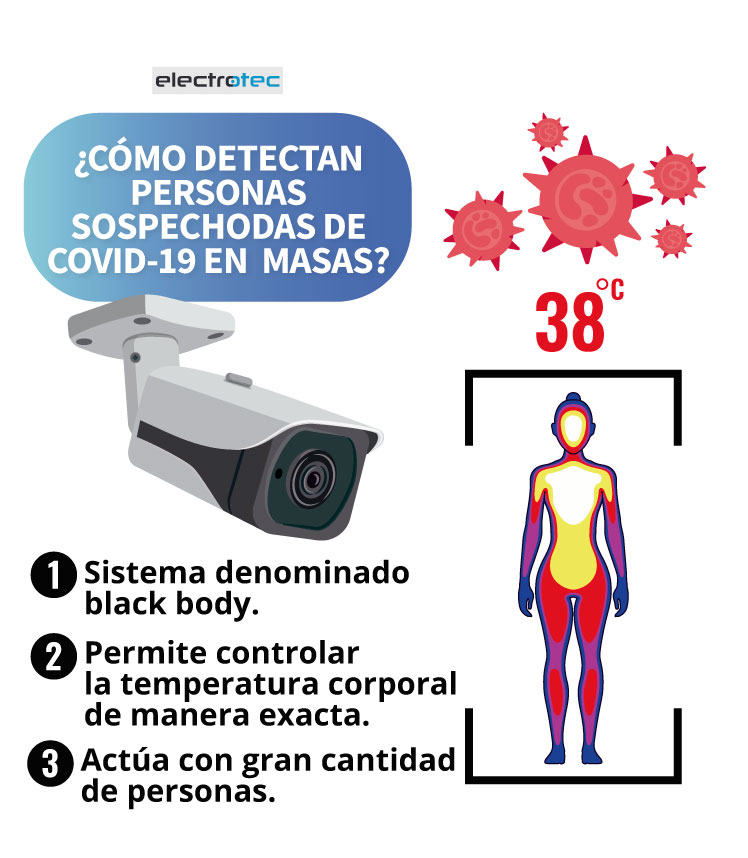
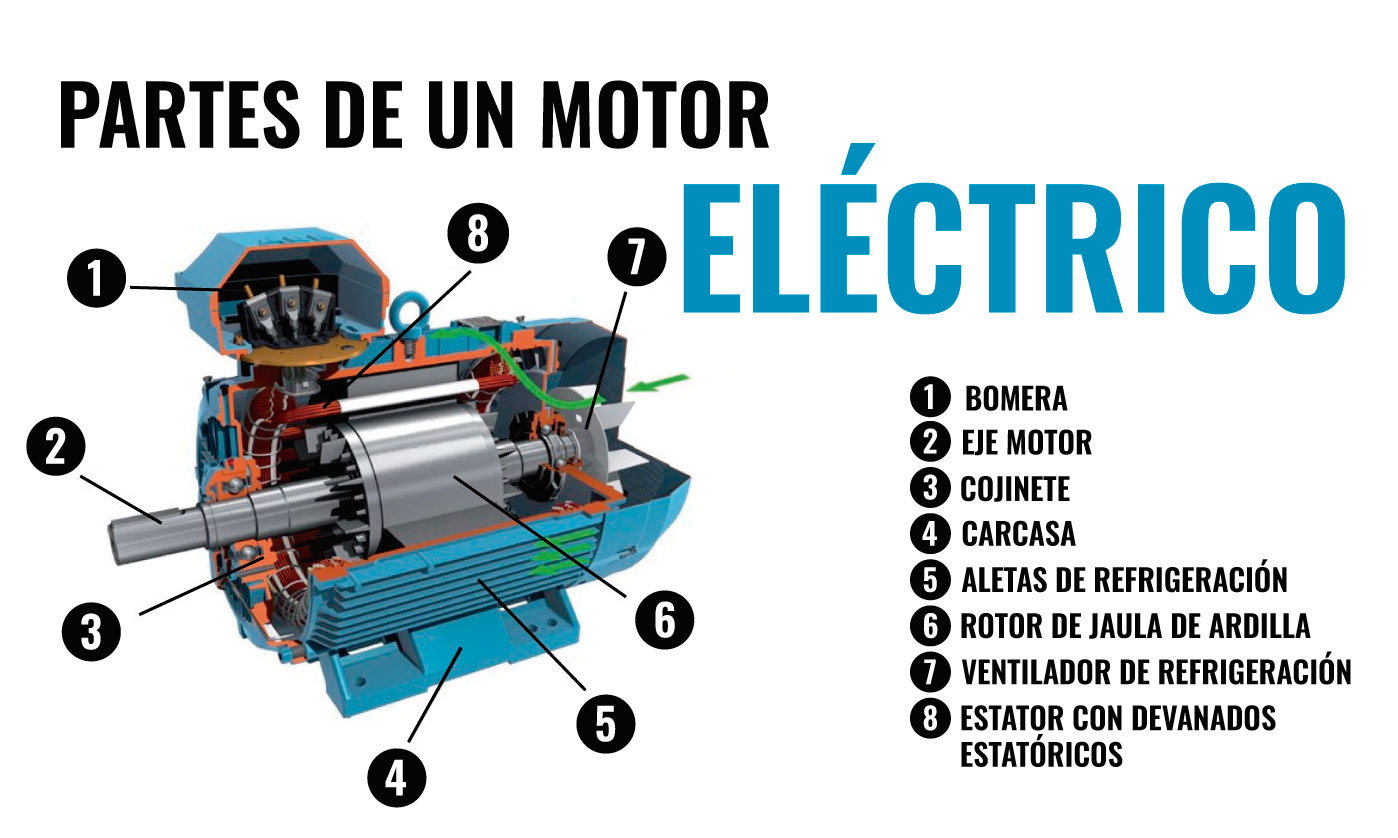
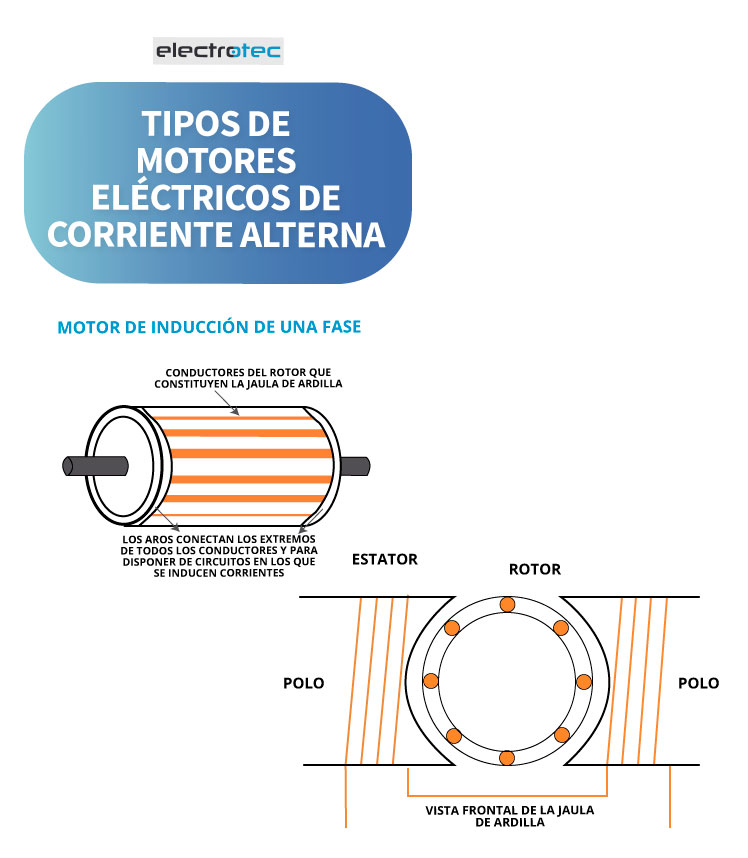
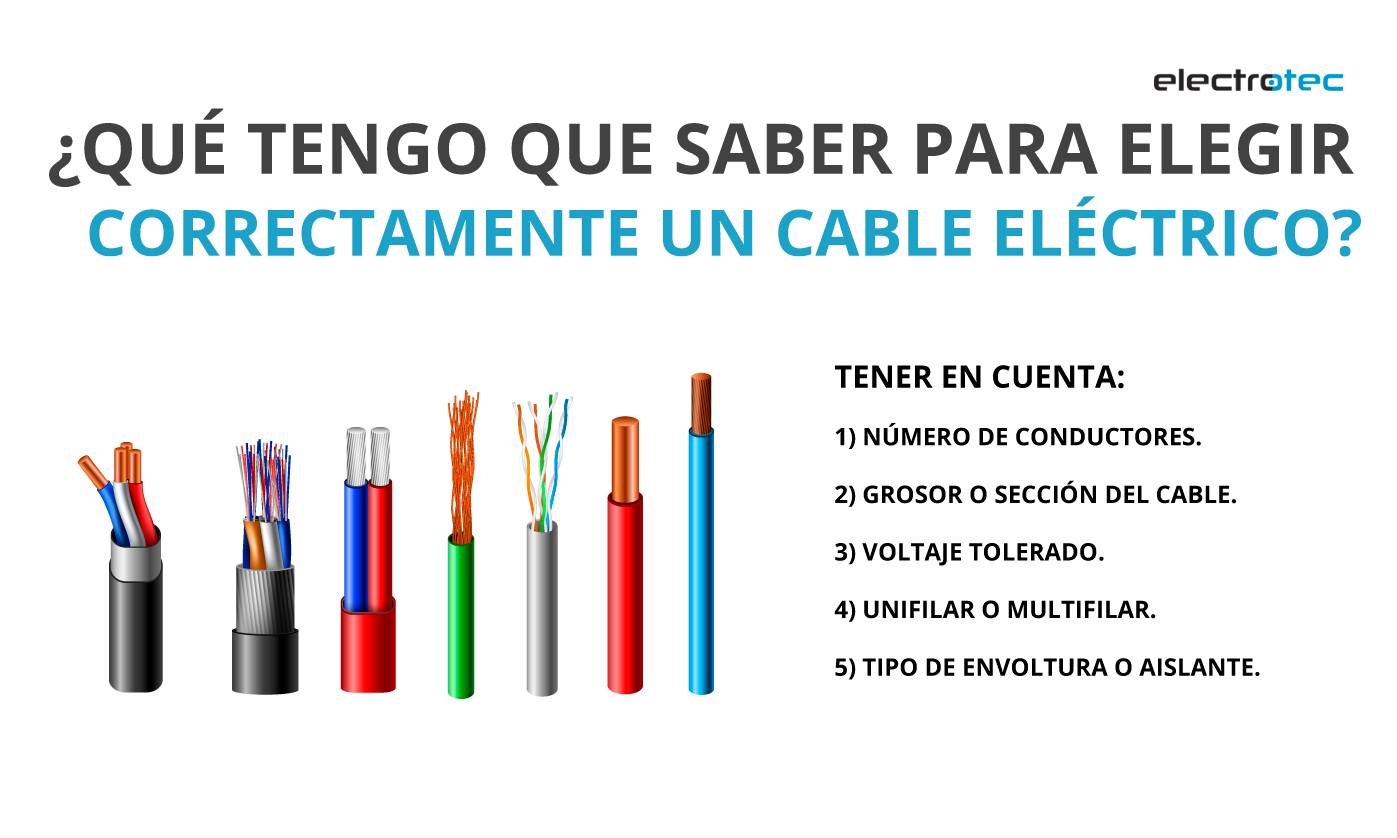
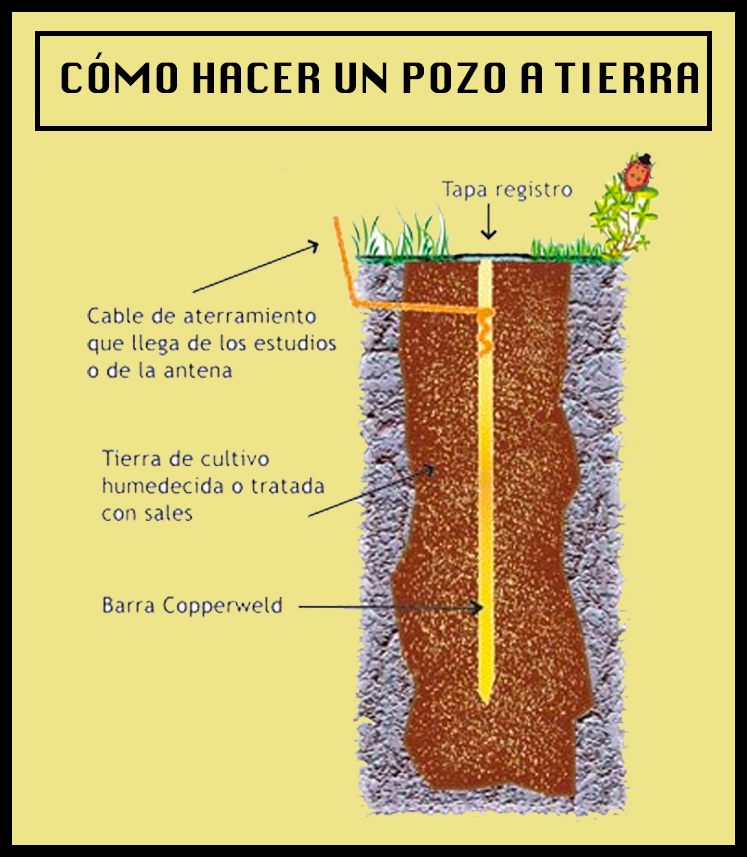
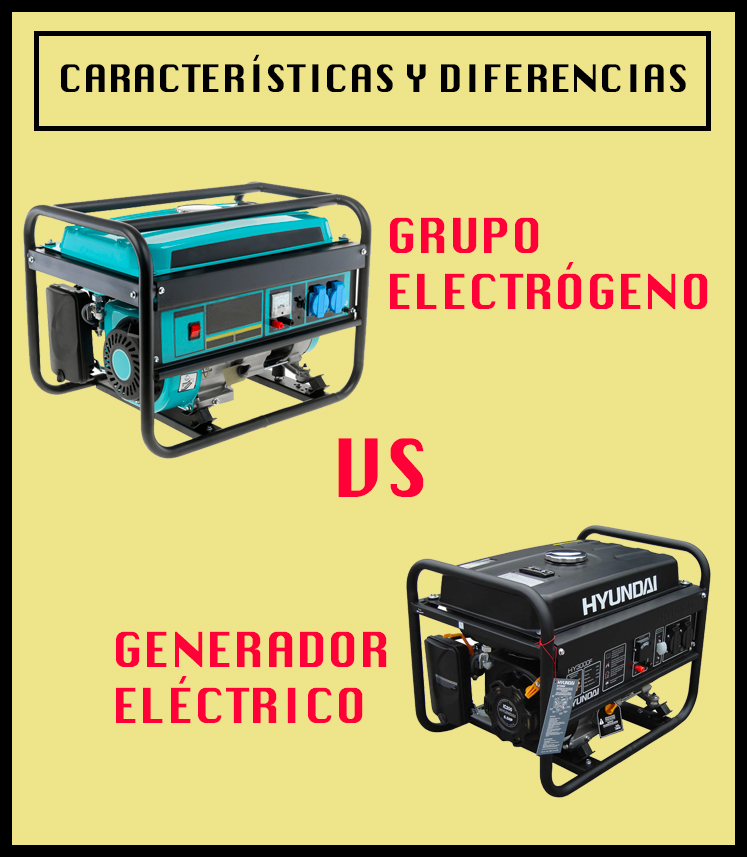
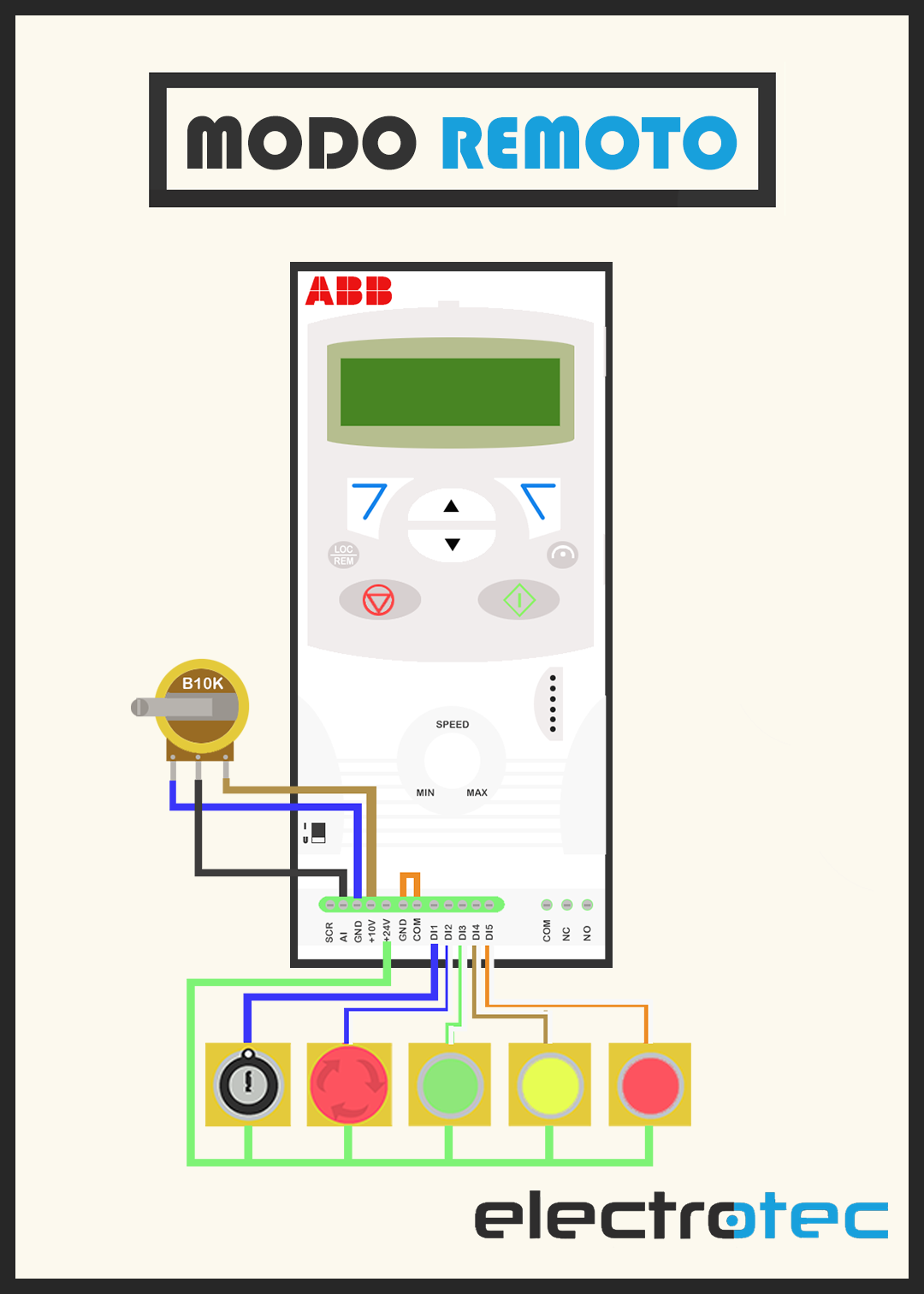
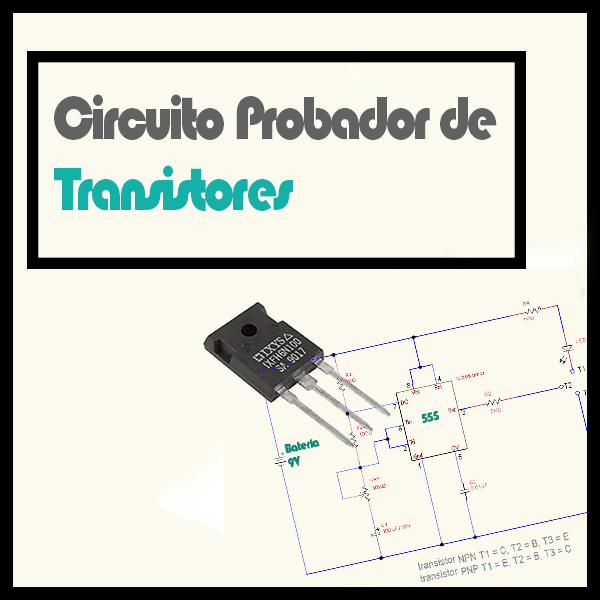
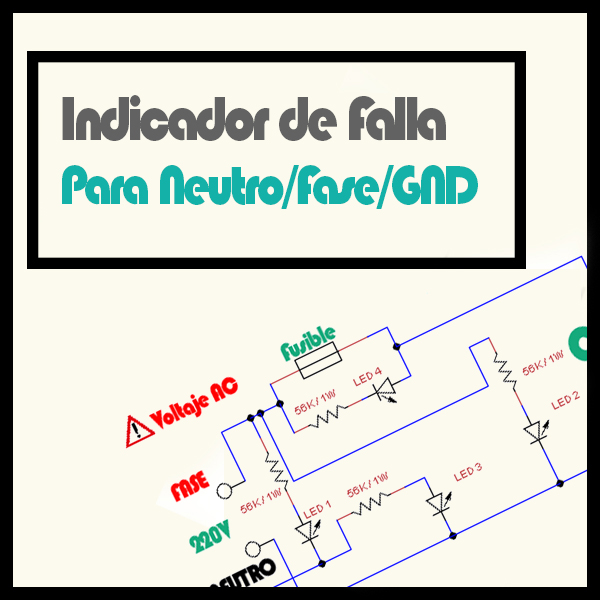
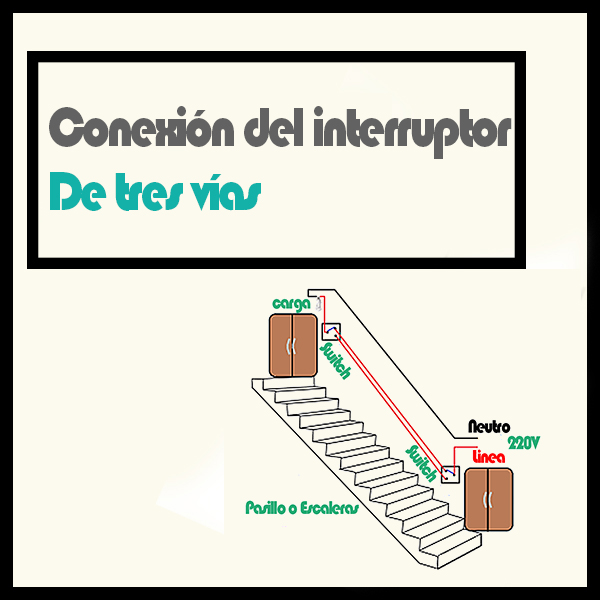
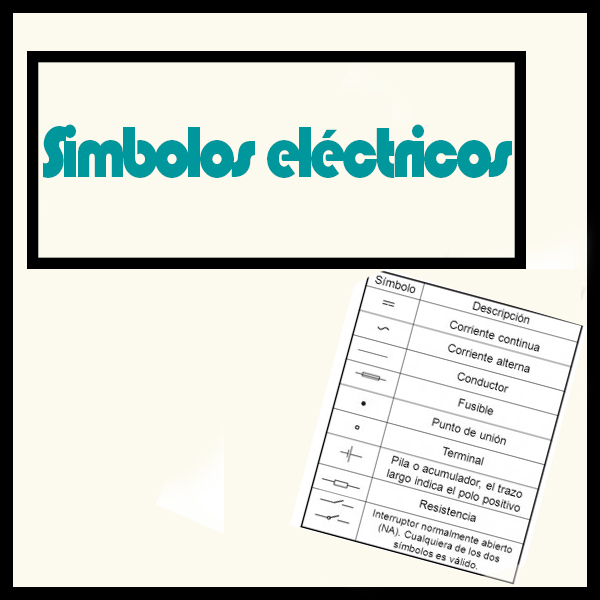
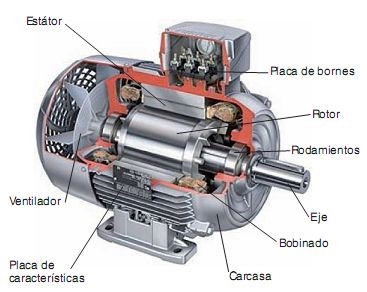
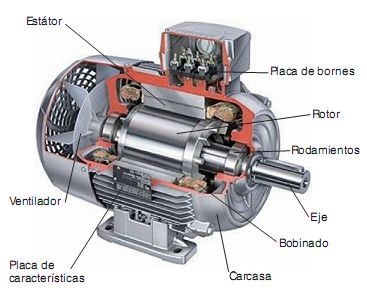
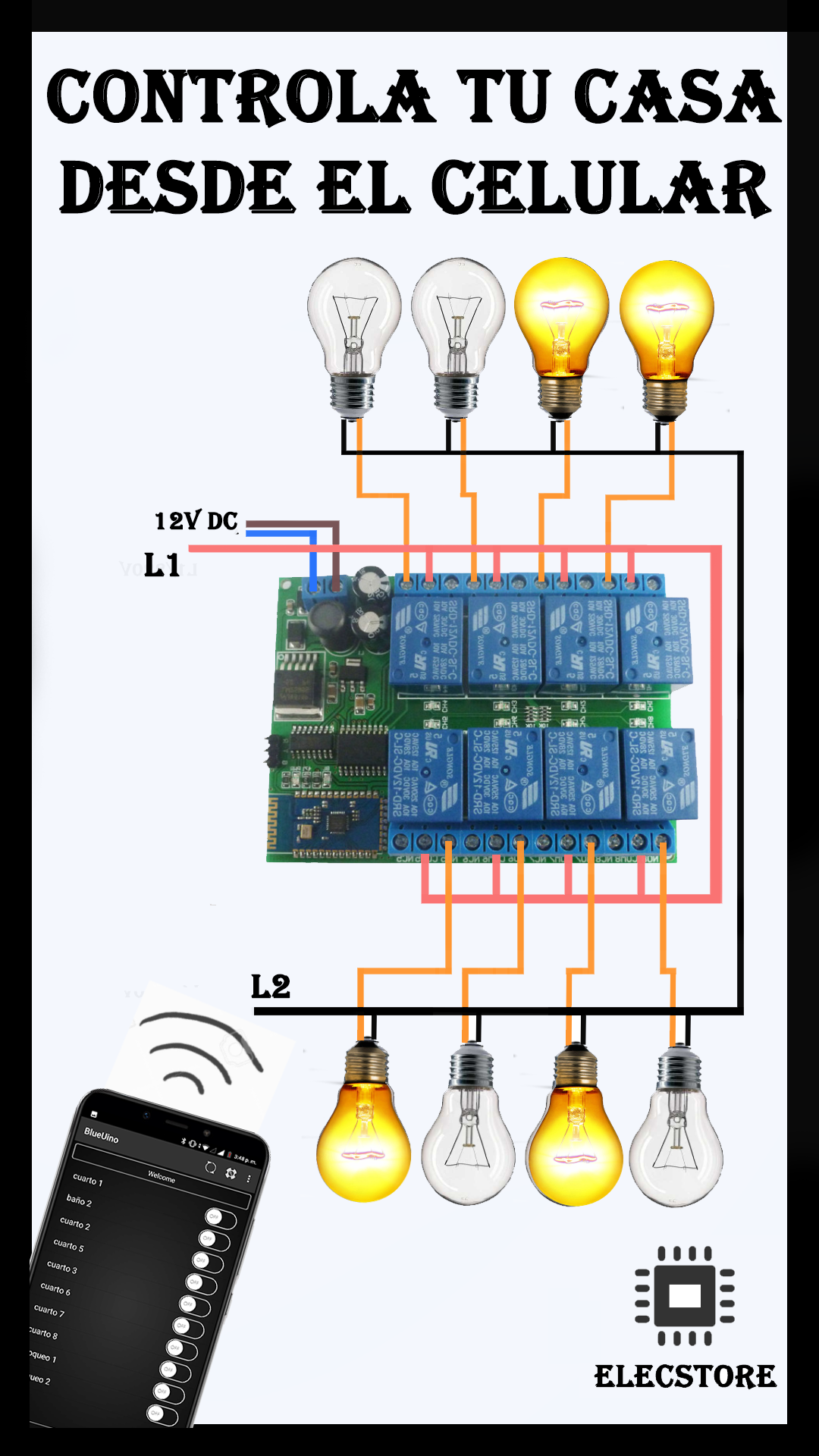
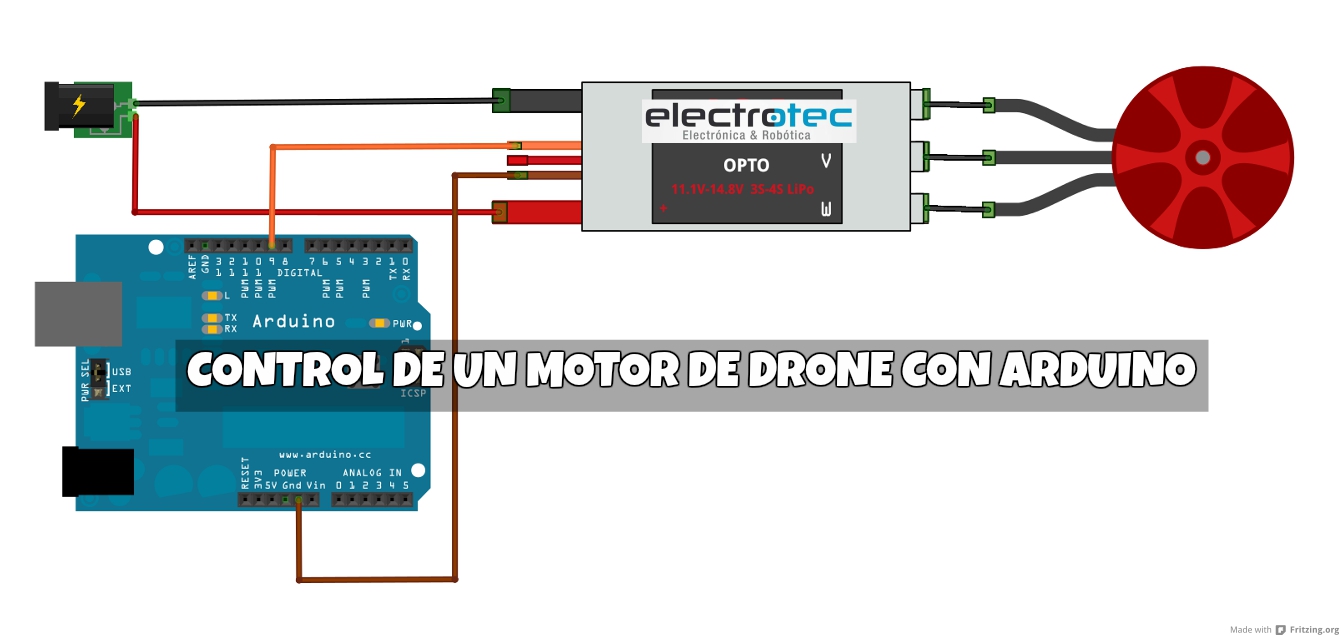
Curso Gratuito de Electricidad Básica Curso Gratuito de Electricidad Industrial Cómo Calcular el Calibre de Cable para una Instalación Eléctrica COMO VER LAS CAMARAS DE VIDEOVIGILANCIA DESDE TU CELULAR Y LA COMPUTADORA Cómo Detectar Fugas de Electricidad en Tu Hogar: Guía Paso a Paso TIPOS DE CABLES Y SUS CARACTERÍSTICAS ¿CÓMO HACER UN ARRANQUE DIRECTO DE UN MOTOR TRIFÁSICO? CONOCE LOS 3 TIPOS DE VOLTAJES EN UNA RED ELÉCTRICA TRIFÁSICA CÓMO PROTEGER UN VARIADOR DE FRECUENCIA ¿Qué hay por dentro de un PLC S7-1200 de SIEMENS? Las placas internas ¿Por qué se pone un DIODO en paralelo con el RELAY? Cómo identificar a la BOBINA DE ARRANQUE Y DE TRABAJO Instalación eléctrica de una bomba de agua CÓMO HACER LA SOLDADURA EXOTÉRMICA Como realizar un balanceo de carga en un circuito trifásico de 220 voltios en el Perú cómo hacer el ARRANQUE SECUENCIA DE 3 MOTORES TRIFASICOS COMO FUNCIONAN LOS TRANSFORMADORES DIFERENCIA ENTRE BOBINA DE ARRANQUE Y BOBINA DE TRABAJO EN UN MOTOR MONOFÁSICO FASE, NEUTRO Y TIERRA BIEN EXPLICADO MCB, ¿cómo funcionan? Cómo identificar FASE y NEUTRO en un tomacorriente FACIL INSTALACIÓN DE POZO A TIERRA PARA UNA VIVIENDA CORRECTA INSTALACIÓN DE DUCHA ELÉCTRICA REALIZA UN SISTEMA CONTRA INCENDIO CASERO COMO AÑADIR DOS FOCOS A UN SISTEMA CONMUTATIVO CONEXIONADO DE UN MEDIDOR CONVENCIONAL E INTELIGENTE SISTEMA DE ELEVADOR DE CARGAS O ASCENSOR SISTEMA DE ALARMA CONTRA ROBOS CASERO Sistema de llenado con faja transportadora controlado por un LOGO! CONTROL DE ILUMINACIÓN EN CADENA CON LOGO ARRANQUE DE VELOCIDADES CONSTANTES CON LOGO Y VARIADOR ABB AUTOMATIZA TU ARRANQUE ESTRELLA TRIANGULO CON LOGO V8! CAMBIO DE GIRO AUTOMÀTICO CON VARIADOR ESQUEMA DE CONTROL PARA UN SISTEMA LIFO Y CONTROLAR DOS MOTORES SECUENCIALES DIFERENCIAS ENTRE BOMBAS PERIFÉRICAS Y CENTRÍFUGAS TRUCOS PARA BAJAR EL CONSUMO DE LUZ ARRANQUE DE UN MOTOR MEDIANTE BOYA DE NIVEL ¿CUANTOS AMPERIOS SOPORTA UN CABLE? ¿QUE ES UN PLC Y COMO FUNCIONA? ARRANQUE ESTRELLA DELTA (TRIÁNGULO) DE UN MOTOR TRIFÁSICO TRANSFERENCIA DE CONTROL ELECTRICA SECUENCIA CÍCLICA PARA EL ARRANQUE DE DOS BOMBAS ALTERNADAS ARRANQUE TEMPORIZADO CON UN PULSADOR NORMALMENTE ABIERTO ¿Puedo unir el neutro con el conductor de tierra en una instalación eléctrica? MANERAS DE SOLUCIONAR UNA FUGA DE CORRIENTE MINUTERO PARA ESCALERA DE 3 HILOS ARRANQUE DE BOMBA ALTERNADAS MANUAL AUTOMÁTICO ARRANQUE DE BOMBA MONOFÁSICA CON SELECTOR Y ELECTRONIVEL CONMUTACIÓN DE POTENCIA DUAL CON CONTACTORES ESQUEMA ELÉCTRICO PARA UNA PISCINA ACTIVACIÓN DE 3 CONTACTORES EN CASCADA MEDIANTE TEMPORIZADORES NEUMÁTICOS ALTERNANCIA DE DOS BOMBAS MEDIANTE TEMPORIZADORES ESQUEMA ESTRELLA - TRIÁNGULO DE POTENCIA Y MANIOBRA CONEXIÓN DE TABLERO TRIFÁSICO 380V / 220V AC ARRANQUE DE UN MOTOR TRIFÁSICO CON TERMOSTATO COMO CONTROLAR UNA BOMBA DE AGUA DE MANERA REMOTA ARRANQUE Y PARADA DE EMERGENCIA CON FINAL DE CARRERA CONTROL DE UNA BOMBA DE AGUA MONOFÁSICA DE MANERA MANUAL - AUTOMÁTICA IE5 PROTECCIÓN ELÉCTRICA ANTE SOBRECORRIENTES ¿POR QUÉ NO ARRANCA EL COMPRESOR DEL REFRIGERADOR? SENSORES AUTOMOTRICES FUNCIONAMIENTOS Y FALLAS - SÍNTOMAS DE FALLO DE SENSOR TPS, MAP, MAF CKP, CMP QUE COMPONENTE NO DEBE MARCAR CONTINUIDAD EN UNA TARJETA ELECTRÓNICA DE FUENTE CONMUTADA TABLERO TRIFÁSICO 380 V ac CON DERIVACIÓN MONOFÁSICA DE 220 V ac PAGA MENOS LUZ CON ESTE TRUCO ¿QUÈ ES INRUSH? AMPERÌMETRO FLUKE 2021 CALCULA FACILMENTE UN CONDENSADOR PARA UN MOTOR TRIFÀSICO 5 DIFERENCIAS ENTRE AIRE ACONDICIONADO INVERTER Y CONVENCIONAL DIFERENCIAS ENTRE UNA CÁMARA ANÁLOGA Y UNA IP COMO MEDIR RESISTENCIA DE PUESTA A TIERRA CON TELUROMETRO FORMAS PARA DETECTAR UN CORTOCIRCUITO EN CASA 3 FORMAS DE PROTEGER UN MOTOR ELÉCTRICO CÓMO INSTALAR UNA BOMBA DE AGUA SURMERGIBLE CON PANELES SOLARES COMO INSTALAR UN SISTEMA CONTRAINCENDIOS PASO A PASO TIPOS DE SENSORES DE TEMPERATURA INDUSTRIALES: RTD vs TERMOCUPLA COMO SABER SI EL TERMOSTATO DE UN REFRIGERADOR ESTA DAÑADO Cómo vigilar tu casa desde el celular CÓMO AHORRAR ENERGÍA ELÉCTRICA CON UN MEDIDOR DOMÓTICO INTELIGENTE INSTALACION DE UN INTERRUPTOR DE LUZ DOMÓTICO Y SUS VENTAJAS 4 FORMAS DE ARRANCAR UN MOTOR ELECTRICO PRUEBAS ELECTRICAS A LOS TRANSFORMADORES DE DISTRIBUCION FALLAS MÁS COMUNES EN LAS BOMBAS DE AGUA Y COMO SOLUCIONARLO COMO CALCULAR EL BANCO DE CONDENSADORES CÓMO CALCULAR LA CAÍDA DE TENSIÓN EN UN MOTOR TRIFÁSICO COMO SOLDAR TUBERÍAS DE COBRE DE MANERA SENCILLA EL 85% DE FALLAS EN LOS AIRES ACONDICIONADOS SON POR ESTAS 4 RAZONES PARTES Y FUNCIONAMIENTO DEL SISTEMA ELECTRICO DE UN AUTOMOVIL TIPOS DE SISTEMAS PARA EL BOMBEO DE AGUA CONEXION DE UN SENSOR PNP-NPN A UN PLC CÁLCULO DEL CALIBRE DEL CABLE PARA UN MOTOR TRIFASICO EL METODO DEFINITIVO PARA COMPROBAR SI UN OPTOACOPLADOR ESTA DAÑADO QUÉ CABLE USAR EN NUESTRAS INSTALACIONES ELECTRICAS COMO SOLUCIONAR TU FALTA DE PRESION DE AGUA CON UN TANQUE HIDRONEUMATICO 10 RAZONES POR LAS QUE TU REFRIGERADOR NO ENFRÍA y CÓMO SOLUCIONARLO TIPOS DE CANALIZACIONES ELECTRICAS TABLA PARA ELEGIR EL TANQUE HIDRONEUMATICO ADECUADO ¿Cómo saber si un capacitor está en mal estado o no? MI REFRIGERADOR ENFRÍA ARRIBA PERO NO ABAJO ¿CÓMO FUNCIONA UN PANEL SOLAR? ¿CÒMO FUNCIONA UN INDUCTOR? ¿A que profundidad se entierran las instalaciones eléctricas? CUÁNTO TOMACORRIENTES SOPORTA UN INTERRUPTOR DE 15A ¿Qué DIFERENCIA hay entre un Capacitor de Arranque y Marcha? FUGAS ELÉCTRICAS: CAUSAS Y CÓMO SOLUCIONARLO ¿QUE ES UN ARCO ELÉCTRICO? Como lograr que un foco LED dure 50 años con simple truco! Fase, Neutro y Tierra BIEN EXPLICADO Como Hacer un Inversor de Voltaje de 12v a 220v Fácil y Rápido COMO HACER EL CABLEADO ELECTRICO PARA TU CASA - PASO A PASO CÓMO ELEGIR EL INTERRUPTOR TERMOMAGNÉTICO CORRECTO COMO DETECTAR Y SOLUCIONAR FALLAS EN LOS EQUIPOS DE AIRE ACONDICIONAD ¿De dónde viene la sobre tensión eléctrica? SIMBOLOS PARA UNA MEJOR LECTURA DE PLANOS ELÉCTRICOS CONOCE LOS CALIBRES DE CABLE MÁS USADOS COMO HACER UNA MINI BOBINA TESLA FUNCIONARÁ UN PANEL SOLAR SI SE ROMPE ? Diferencia entre sistemas eléctricos monofásicos, bifásicos y trifásicos CÓMO REPARAR LA FUGA DE GAS DE UN REFRIGERADOR COMO PURGAR DE MANERA SENCILLA UNA BOMBA DE AGUA CÓMO CONTROLAR UNA LÁMPARA DESDE 2, 3 y 4 PUNTOS DIFERENTES QUÉ HACER SI TU BOMBA DE AGUA NO ARRANCA: SOLUCIÓN DIFERENCIAS ENTRE UNA BOMBA CENTRIFUGA Y PERIFERICA CÓMO REPARAR Y ENCONTRAR UN CORTOCIRCUITO CÓMO USAR TU MULTIMETRO PARA SABER SI TU MOTOR ESTÁ DAÑADO CÓMO HACER UN TABLERO DE TRANSFERENCIA AUTOMÁTICA MARCAS MÁS USADAS EN LOS VARIADORES DE FRECUENCIA RECONOCIMIENTO DE FALLAS EN PLACAS ELECTRÓNICAS Y SU REPARACIÓN CÓMO SABER SI UN SENSOR INDUSTRIAL FUNCIONA CORRECTAMENTE MANEJO DE UN VARIADOR DE FRECUENCIA CONTROLADO DESDE EL CELULAR Arranque alternado de dos motores desde el celular con arduino y PLC CÓMO LEER EL PLANO ELÉCTRICO DE UNA VIVIENDA CONFIGURACION DE LA SALIDA ANALOGICA DEL PLC S7-1200 COMUNICADO CON UN HMI PARA CONTROLAR EL VFD CÓMO ENCENDER UNA BOMBA DE AGUA DESDE CUALQUIER LUGAR CÓMO SABER SI UN INTERRUPTOR TERMOMAGNÉTICO ESTÁ DAÑADO APRENDE A REPARAR UN FOCO LED PASO A PASO Como saber si tu motor está dañado ENCENDIDO DE UNA LAMPARA DE VAPOR DE SODIO Como realizar un arranque estrella triangulo de un motor trifasico desde el Celular TIPOS DE EMPALMES MAS USADOS QUE ES UNA FOTOCELDA Y SU CONEXIÓN Arranque estrella - triángulo con Arduino QUE ES UN INTERRUPTOR DIFERENCIAL CUANTO COBRAR EN UNA INSTALACIÓN ELÉCTRICA DOMICILIARIA TIMER 555 Y APLICACIONES CONOCE TODO ACERCA DE LA ILUMINACIÓN ELÉCTRICA EN VIVIENDAS Cómo controlar la velocidad de un motor con un MOSFET TIPOS DE CABLE PARA CÁMARAS DE VIDEOVIGILANCIA Y CCTV COMO INSTALAR UNA BOMBA DE AGUA CÓMO HACER UNA INSTALACIÓN DOMÓTICA FÁCIL Y ECONÓMICA CÓMO FUNCIONA EL MOTOR DE DRONE ARRANQUE SECUENCIAL DE 2 MOTORES ELÉCTRICOS CONEXIÓN DE UN FLOTANTE ELECTRICO CON UNA BOMBA DE AGUA COMO ELIMINAR EL PARPADEO DE LAS LAMPARAS LED TIPOS DE CABLES ELECTRICOS QUE USAMOS EN UNA INSTALACION ELÉCTRICA QUÉ ES Y PARA QUÉ SIRVE EL RELÉ TÉRMICO COMO INSTALAR UN TEMPORIZADOR O TIMER ELECTRICO LOS 13 ERRORES MÁS COMUNES AL INSTALAR UN EQUIPO DE AIRE ACONDICIONADO DIFERENCIAS ENTRE CORRIENTE CONTINUA Y CORRIENTE ALTERNA COMO DETERMINAR LA CAPACIDAD DE UN EQUIPO DE AIRE ACONDICIONADO TIENES QUE CONOCER ESTO PARA COMPRAR UN EQUIPO DE AIRE ACONDICIONADO COMO HACER UN CIRCUITO ELECTRIFICADOR DE CERCAS CAUSAS POR LAS QUE UNA LAPTOP SE RECALIENTE Qué es y cómo funcionan los optoacopladores Diferencias entre cables de RED COMO FUNCIONA EL MOTOR DE UN DISCO DURO COMO CALCULAR LA CAPACIDAD DE UN INTERRUPTOR TERMOMAGNETICO cómo funcionan los motores de inducción PORQUE SE QUEMAN LOS TOMACORRIENTES Y CÓMO CAMBIARLOS COMO VERIFICAR SI UN MOTOR NO ESTÁ DAÑADO COMO REALIZAR EL MANTENIMIENTO DE UN POZO A TIERRA FUNCIONAMIENTO DEL AIRE ACONDICIONADO PARA EDIFICIOS COMO FUNCIONA UNA TERMA SOLAR COMO FUNCIONA UNA CENTRAL HIDROELECTRICA Y COMO GENERA ENERGIA COMO FUNCIONA EL MOTOR DE PASOS CÓMO FUNCIONA UN GENERADOR ELÉCTRICO CARACTERÍSTICAS Y FUNCIONAMIENTO DE UN UPS COMO FUNCIONAN LOS CABLES DE FIBRA OPTICA COMO FUNCIONA UNA BOMBA CENTRIFUGA TIPS PARA SABER SI UN CIRCUITO INTEGRADO ESTA DAÑADO FALLAS MÁS COMUNES DE DIODOS EN PLACAS ELECTRÓNICAS Primeros pasos para trabajar con el PLC LOGO! COMO INSTALAR UN TABLERO ELECTRICO DOMICILIARIO DIAGRAMAS ELECTRICOS RESIDENCIALES BÁSICOS CUAL ES LA FASE Y NEUTRO EN UN TOMACORRIENTE COMO FUNCIONAN LOS MOTORES DE CORRIENTE CONTINUA Cómo funcionan las SUBESTACIONES ELECTRICAS ¿Que es un Disco Duro? ¿Como detectan personas sospechosas de covid-19 en masas? ¿Como funciona un detector de incendios? DISEÑO DE ILUMINACION CON SOFTWARE COMO FUNCIONAN LOS DIODOS COMO FUNCIONA TU AIRE ACONDICIONADO Tienes que conocer esto para instalar un SISTEMA CONTRA INCENDIOS ESTE DISPOSITIVO ES CAPAZ DE DETECTAR FUGAS DE ELECTRICIDAD Como descargar capacitador de horno de microondas Partes de un Motor Electrico SEMINARIO: INSTALACION DE CERCOS ELECTRICOS COMO RECONOCER UN CABLE FALSIFICADO SEMINARIO: SISTEMA DE PRESION CONSTANTE INTRODUCCIÓN A LA RED ÓPTICA PASIVA || FIBRA ÓPTICA SEMINARIO: RECONOCIMIENTO DE ESQUEMAS Y SIMBOLOGÍA ELÉCTRICA FUNDAMENTOS PARA LA INSTALACIÓN DE PARARRAYOS SEMINARIO CONEXION DAHLANDER BOBINADO DE MOTORES ELECTRICOS SEMINARIO INTRODUCCIÓN A LOS TRANSFORMADORES ELÉCTRICOS SEMINARIO: CONEXION DE MOTORES TRIFASICOS SEMINARIO: DIMENSIONAMIENTO DE UN ARRANQUE DIRECTO SEMINARIO: INTRODUCCIÓN A LOS VARIADORES DE FRECUENCIA SEMINARIO: PANELES SOLARES Y SUS APLICACIONES SEMINARIO: INTRODUCCIÓN A LA FIBRA ÓPTICA SEMINARIO: INTRODUCCIÓN A LOS GRUPOS ELECTRÓGENOS SEMINARIO: INTRODUCCIÓN A LA ENERGÍA EÓLICA SEMINARIO: FIBRA OPTICA HASTA EL HOGAR (FTTH) SEMINARIO: SISTEMA DE PUESTA A TIERRA SEMINARIO: CORRECCION DEL FACTOR DE POTENCIA EN LAS INDUSTRIAS TIPOS DE POZO A TIERRA PARTES PRINCIPALES DE UN TRANSFORMADOR TIPOS DE SENSORES INDUSTRIALES TIPOS DE MOTORES ELECTRICOS AC CÓMO ELEGIR CORRECTAMENTE UNA LÁMPARA LED 6 ERRORES DE ELECTRICIDAD DOMICILIARIA QUE DEBES EVITAR QUÉ TENGO QUE SABER PARA ELEGIR UN CABLE ELÉCTRICO ARRANCADORES SUAVES: QUÉ ES Y POR QUÉ USARLOS QUÉ LE PASA A TU CUERPO CUANDO TE ELECTROCUTAS FUNCIONAMIENTO DEL RELE ELECTROMECÁNICO POR QUÉ SE CALIENTAN LOS CABLES ELÉCTRICOS Cómo son los manómetros digitales IMPORTANTE: Cómo es la seguridad al interior del automóvil CONTACTORES ELÉCTRICOS: CARACTERÍSTICAS Y FUNCIONAMIENTO Lo que debes tomar en cuenta al usar fibra óptica Cómo harías un pozo vertical Diferencia entre un generador eléctrico y un grupo electrógeno Cómo funciona el levantavidrios de tu automóvil Conoce estos sensores de presión más pequeños Cómo es dentro de un cable coaxial CÓMO FUNCIONAN LOS TRANSISTORES POR QUÉ LE DICEN DIODO GAY DIFERENCIANDO CABLES NEUTRO Y TIERRA FALSA ALARMA DE INCENDIO: CAUSAS Y SOLUCIÓN TIPOS DE CONEXIÓN EN TRANSFORMADORES TRIFASICOS Refrigerantes halogenados Solenoides en el arranque de un automóvil Controlar el movimiento de una antena con diagrama de bloques Cómo se transmiten datos en la fibra óptica Regulando el voltaje con el diodo Zener potencia aparente: lo que nos cobra en el recibo de luz FUNCIONAMIENTO DE LOS BANCOS DE CONDENSADORES CÓMO USAR EL TELURÓMETRO PARA MEDIR UNA PUESTA A TIERRA CÓMO LEER UN PLANO ELÉCTRICO INDUSTRIAL CUÁL ES LA FUNCIÓN DE UNA PUESTA A TIERRA Cómo funciona un panel solar Ventajas de usar fibra óptica ACCIDENTES ELÉCTRICOS: CONSECUENCIAS & CÓMO ACTUAR Qué son las celdas solares Calor y enfriamiento dentro y fuera de un edificio Cómo es un motor de arranque en el automóvil Cómo son los sensores de presión Refrigerantes tóxicos Interruptores en el arranque de un automóvil Partes de un transformador trifásico Clases de fluidos refrigerantes Componentes del sistema de arranque Sabes leer un diagrama de bloques SUBESTACIONES ELECTRICAS - SEMINARIO Control de un motor eléctrico con mensajes de texto Sensor de nivel de liquido con minibomba Arranque de un motor trifásico con el celular Fotodiodo Motor Eléctrico Diodo Láser - Concepto y aplicaciones GPS (Sistema de posicionamiento global) Interruptores Eléctricos Tipos de Relé Relé - Concepto y funcionamiento Diodo LED - Concepto y aplicaciones Interruptores Li-Fi Light Fidelity El Diodo: Unión PN Luces LED intermitentes en forma de corazón Microcontrolador VS PLC Parte II Microcontrolador VS PLC Módulo de pantalla LCD 16x2 Tipos de condensadores Diferencias entre pantallas LED y LCD Tipos de sensores Parte II Sensores, tipos y funcionamiento ADC - Convertidores analógicos a digitales Transformador de audio Corrientes Parasitas ¿Qué es el JFET? ¿Que son armónicos? ¿Ques es un resistor? 5 Errores Comunes - Raspberry PI Parte II 5 Errores Comunes - Raspberry PI Parte I Concepto de DIAC Par de transistores Darlington Fusibles Power Over Ethernet ( POE ) Generador de onda diente de sierra Fuentes de alimentación en un CCTV Generador de Voltaje negativo Circuito intercomunicador - Diseño Electronico Voltimetro Con Arduino VARIADOR EN MODO REMOTO Control inalámbrico de Motor DC ¿Que es un Termistor? Circuito para Medir nivel de baterias Control de Ventilador por termistor Circuito Probador de Transistores Indicador de Falla (Neutro/Fase/GND) Conexión del interruptor de tres vías Detector de mentiras - Diseño electronico Driver para Servomotor - Diseño Electronico Mezclador de Audio con solo un Transistor Diferencias entre Arduino y Raspberry PI 5 Errores Comunes - Arduino PII Microcontroladores PIC - Santiago Corrales Generador de Onda Cuadrada - Diseño Electronico Circuito de protección contra sobrevoltajes Camaras con energia solar - lo que necesitas saber tipos de camara - CCTV Arranque Suave para Fuente de Poder 5 Errores Comunes - Arduino LiFi vs WiFi Tipo de resistor - P1 Display 7-Segmentos SISTEMA ALTERNADO DE BOMBAS ¿Cuál es la diferencia entre microprocesador y microcontrolador? El Telurometro - PAT reflectómetro de dominio de tiempo óptico - OTDR Tipos de Empalme - Fibra óptica Ponchado RJ45 - PASO A PASO LLenado de tolva - Automatización Industrial CadeSIMU - Software Partes de un Drone RESISTENCIAS PULL UP Y PULL DOWN Indicador de Nivel - Diseño eléctronico RFID Radio Frequency Identification Interconexion de Paneles solares Inversor 12V DC - 120 AC Controlador Solar Termocuplas - Instrumentacion Industrial Sistema de distribución eléctrico - Gráfico Microcontrolador 16f84 Transistores - Concepto Básico Servomotor - Concepto Basico Control Servomotor Con Arduino - Proyecto Arduino Llenado de contenedor automatizado Amplificador Operacional - Concepto Basico Luz infraroja Aux - Diseño eléctronico Aire Acondicionado - Explicación de trabajo Puente Rectificador Casa Automatizada - Proyecto Arduino Control de Grua con Pulsadores Temporizado ajustable con 555 Simbolos Normalizados Circuito Integrado 555 Tablero de Transferencia eléctrico Escalera Eléctrica con barrera fotoeléctrica ¿Que es un PLC? Alumbrado Automatizado Relé Estado Solido SSR ¿Que es PWM? Arranque motor 3Fasico Delta-Estrella Manual Sistema de puerta automatica Empalmes Electricos Arranque de motores en cascada Tipos de AISLAMIENO en los cables eléctricos PROTEUS 8 - SOFTWARE PCB WIZARD - Software Lampara con respaldo de emergencia - Diseño Electronico Conexion Baterias Serie - Paralelo Defectos más frecuentes en motores eléctricos Defectos más frecuentes en motores eléctricos Conexión del relé detector de fallo de fase Diagrama de conexion tablero residencial Arranque de motor trifásico con sensor tipo boya Letrero luminoso led con contactor y reloj horario Conexión de 6 lámparas de manera correcta Transformador Eléctrico - Parte 2 Transformador Eléctrico - Parte 1 Funcionamiento de un sistema de refrigeracion Transformador de voltaje capacitivo Sensor de proximidad para autos - Proyecto Arduino Ebook - Principios de Electrónica - Malvino Detector de voltaje (AC) por campo electromagnético - Diseño Electronico Ebook - Introduccion al analisis de circuitos - Boylestad 10ma edicion Ebook - Diseño Electrónico - Savant Clasificacion AWG Fuente de poder Dual - Diseño Electrónico Ebook - Maquinas Electricas - Stephen. Chapman Cargador Solar Móvil - Diseño Electrónico QUÉ SON Y CÓMO FUNCIONAN LOS OPTOACOPLADORES Espejo de Corriente - Electronica Sensor de obstáculo Sencillo – Proyecto Arduino Cómo leer un plano eléctrico residencial Factor de Potencia - ¿Por qué mejorar el factor de potencia? Factor de Potencia - Concepto y tipos Ebook - Eletronica Industrial Moderna - Timothy Maloney Temporizador - Funcionamiento y Simbologia NVR Vs DVR Arranque Directo Con inversión de giro Ingress protection PULSADORES ESPECIALES Control Automático de LED – Proyecto Arduino Transformadores eléctricos CONTROLA TU CASA DESDE EL CELULAR LOS CONTACTORES INTERRUPTORES TERMOMAGNÉTICOS Como instalar un Sistema de Videovigilancia INVERSIÓN DE GIRO CON MOTOR TRIFASICO Móvil controlado por una APP ANDROID MANUAL DE BOBINADO DE MOTORES ELECTRICOS Diferencias Arduino Original Y Replica Diferencias Arduino Original Y Replica. Electrónica práctica con microcontroladores PIC FUNDAMENTOS DE CIRCUITOS ELECTRICOS ELECTRONICA TEORIA DE CIRCUITOS Y DISPOSITIVOS ELECTRONICOS PROGRAMACION DE MICROCONTROLADORES PIC EN + PROTEUS PLC AUTOMATIZACIÓN Y CONTROL INDUSTRIAL RECONOCIMIENTO DE HUELLAS DIGITALES Cómo medir el PH de una manera rápida, precisa y económica. PROGRAMACION DE MICROCONTROLADORES PIC CURSO ARDUINO CONTROL DE UN MOTOR DE DRONE CON ARDUINO